I have never been much into beer. I had tried it a number of times but it never made sense to me. This all changed few years ago (2014) when we decided to travel to Ireland. I was not about to go to Ireland and not sit in a couple pubs and have a not few pints of Guinness. Sorry if that sounds a bit chiché, but I was going to have the full experience. So… I started training my tastebuds (at least that’s what I told my wife). I brought some Guinness home to get an idea what might be in store for us. To my surprise, it wasn’t bad.
When we got to Ireland, we went to the Guinness brewery. This was the eye opening experience I needed. It’s an excellent tour. They cover all aspects of the beer making process, but they go deeper. My ah Ha! moment came in their smelling room. It was a white room which had no apparent light source. It had various stations tubes which were emitting what looked like smoke. Each tube had a scent, a different aspect of the various smells and flavors in the beer. I got it. Ohhh this is what I am tasting.
Since then, Guinness has still been a favorite. I found that it’s not that I didn’t like beer so much as I didn’t like the watered down crap at the grocery store. I am learning that I like darker, more complex flavors. I like to cook and have a propensity towards layers and depth of flavor, so perhaps the beer thing is understandable. I seem to have settled into Stouts, Porters, and some IPAs. About a half year ago I came across Northern Brewer. They sell kits to make craft beers at home. They had a great set of videos explaining in great detail how to brew their beers. I was sold. I asked for the White House Honey Porter kit for Christmas, and my wife was kind enough to get it for me. My son-in-law got me a book called How to Brew. (update: A Very good book. I recommend it. It’s written in layers. He provides a base layer of information, then starts over and lays in more and more details. It’s nice because you get the process and which point one can get as deep as one wants by continuing through the rest of the book. 04-02-17).
I watched the Northern Brewer videos as well as read through the instructions several times. There is always a huge difference between book knowledge and doing knowledge. At some point, you just have to step off the ledge and give it a go.
The Experience: Similar to my Guinness experience, I wanted to get the full understanding of each character in play, so I took the time and smell and give some thought about what was going on. The specialty grains were nice. They smell sort of like a natural foods store sort of a sweet hay with hints of chocolate. My mother-in-law said it smelled like peanut butter (which I could smell once she said it). I put the grains in the muslin bag. This was then placed in the cool water. I started heating the water on full heading towards a boil. The warm water and grain smells a little bit like vegetable barley soup. It’s actually quite nice.
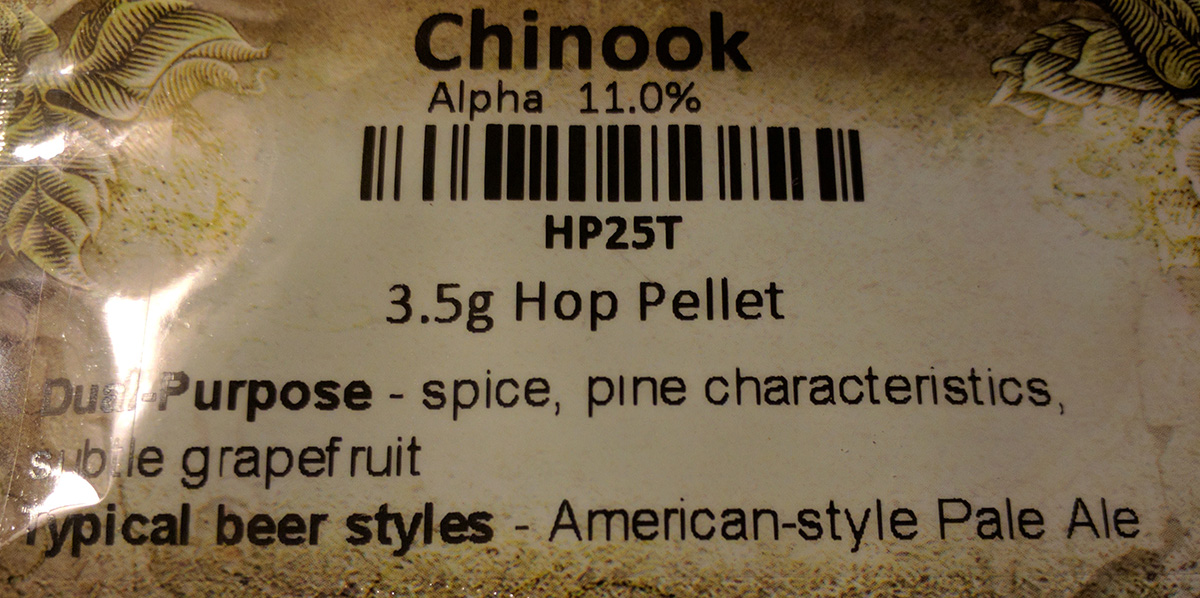
The water was getting warm and I was a couple minutes away from needing to remove the grains. I started prepping my next step which was the first layer of hops, and the malt. The initial hops Chinook had a crazy strong scent. It was strong, like an ipa on steroids. The malt didn’t have much of a smell at all. After the 10 minutes was up I pulled the grain bag and strained it (putting the drippings back into the boil pot). I reduced the heat and added the hops and malt. This made the mixture very thick for a few minutes until I got it all mixed together. I brought the mixture back up to a boil watching to make sure it did not boil over (which was warned about in the instructions). It came close to boiling over, but reducing the heat settled everything out. The hops smell was very intense for a couple minutes, at which point it relaxed into a sort of chocolate milkshake(ish) smell. I’m thinking the milkshake vibe comes from the malt. After roughly 5 minutes I reduced the heat to keep it at a boil, but not be so intense as to lose too much water (I do want some beer at the end of all of this).
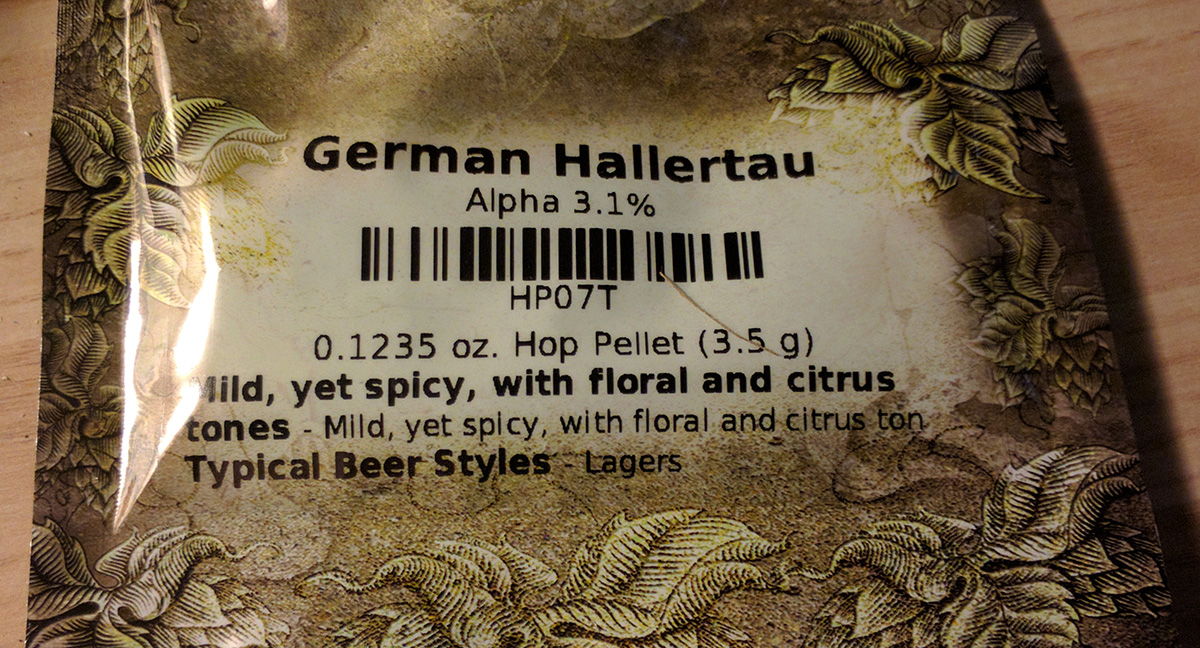
I let it perk along for 40 minutes at which point the instructions had me remove the heat add the honey and a second hopping. This next batch of hops was a German Hallertau. It was very pleasant smell. Sort of like a more delicate hops decorated with a Christmas tree.
As I have been reading, one topic of which there has been a huge amount of emphasis, is sanitization, and it is the point where I nearly tripped up. The process of beer making is actually a war of micro organisms and their food supplies. You want certain things to grow but not others. I poured the honey into the boil pot, I then used some of the hot wart water to get the rest of the honey out. This would be fine in standard cooking, but the jar was not sanitized and some of the liquid touched the outside of the jar. I am sure it’s pretty clear at this point I am not an experienced brewer, and it’s possible this little of a slip may have been perfectly fine, but I didn’t want to take any chances and brought the wart back to a boil. I let it go for a couple of minutes, and then I put the pot into an ice water bath.
From this point I have no pictures of the transfer process and it requires a person with at least 4 or 5 hands. Having only 2 hands, I used both hands to pump the syphon, but I needed one hand to keep the hose in place, and another hand to keep the syphon roughly an inch off the bottom of liquid and out of the trub (all the beer makings which have settled to the bottom). The hose leads down to a Carboy (the vessel where the fermentation takes place). This sits on a chair in front of the counter top, so the gravity of the liquid forces the flow of the syphon. The length of the hose quickly became a problem. When I pumped the syphon, the hose lifted out of the carboy sending liquid onto the chair and floor. I grabbed a cardboard box as it was the only thing sitting close enough to help with my emergency. This helped but didn’t solve it completely. I had to keep a close eye on the hose so it wouldn’t hop out again. The other issue was the tip of the syphon dipping into the trub. Once a good portion of the wart was in the carboy, it’s hard to get enough depth to keep everything flowing. If you lift up, you get air which means the flow stops. If you have to pump to get it to flow again, you bounce the tip around a lot which means you are getting the trub nastiness in the beer it’s a fight at best.
Once all the wart was in the carboy, I added half the yeast package as per the instructions. It was a guesstimate as there’s not really a good way to measure it (as you could potentially add contaminants). You have to eyeball it. I am not too worried as this is what Norther Brewer does in their videos as well. I gave it a good shake. This adds a little extra oxygen to the wart as yeast needs oxygen to thrive. I then I put the lid and airlock on the carboy and set it in the corner of our kitchen. The next morning, I checked it and sure enough, it was bubbling. Now it’s a waiting game. This is not an easy thing for me as I am a tweaker by nature. Hands off is not… well I am keeping my hands off. I will write more once I get into bottling.
If there was an emergency and for some reason the cell system and internet went down, how would you contact those you loved, and more, how would you find out what was going on? Most of the modern world’s population is connected in these 2 ways. Yet time and time again these systems are failing. It seems crucial to have a method of communication which does not rely upon these services.
Ever since I introduced the concept to my son’s cub scout den (several years back), I have had the itch to dig a little deeper into HAM radio and get licensed. Last year, I made a commitment to myself to get licensed by the end of 2016. I made this decision for multiple reasons. Of course one reason, and the main reason was listed in the opening paragraph, but it also seemed to be a perfect addition as it aligns with many of my current interests. I have been involved in media my whole life. I started playing with sound when I was very young, and have been expanding ever sense. Sound is all about frequency, energy, and the manipulation thereof. I have also always been a tinkerer and tweaker. Modern language seems to have shifted, and I suppose I could also call myself a hacker, although on most days, perhaps just hack. But my interest in building things, both electronics and widgets here and there all involve a a mind which can take things apart, examine them, and get a pretty good idea about how they work. As I have been reading, this is exactly the mentality of a ham.
If you don’t know what ham radio is, it is a activity which, when licensed, gives one a massive swath of the electromagnetic spectrum to play in. You are given the ability to communicate with people a few hundred feet away up to several thousand miles away with fairly simple equipment. Ham radio does not rely upon massive amounts of infrastructure. It relies upon a piece of equipment you own (a radio) being manipulated in such a way as to direct radio waves to where you need them to go. Yes, this is a fairly simplistic description, and there’s a lot involved (hence why one needs to be licensed), but it’s within reach for all people.
Every year we have a Ham Festival at a near by fairground. They offer what is called VE testing at these fairs, so I decided that I would make this my target date. As always, life gets busy. Life, work, family start to fill in all the gaps in your time. Towards the middle of October I realized that I had a little over 2 weeks to get my head wrapped around this stuff. What I have now learned, is that you will first learn the test, then you will fill in the gaps once you are licensed and can actually put hands upon the gear. I really dug in and started studying my butt off. I found a number of very helpful videos, books, and study aids (which I will link to at the end of this post). I had seen it mentioned several times that if you pass your test for “Technician”(the first level of ham operator), you could immediately take higher tests as long as you had a passing score. After about 8 days, I started to feel fairly comfortable with the material, so I decided to dive into the material for the “General” license. As a second level, of course this was far more intense. The math was harder, and the concepts weren’t so… general. While I knew most of the electronics portion in technicians, I was in very new territory in the general. This was a fantastic chance to flex and scoop up a new layer of knowledge. It wasn’t so foreign that it didn’t make sense, yet it was hard enough that I had to really fight to get it in my head.
Then after a couple mind numbing weeks, test day had arrived. I walked in and registered. They were very organized. Eventually a gentleman called my name and led me back to the testing area. I could only have a calculator and a pencil in hand. I opened the book and found that I knew this stuff. While I was feeling confident, I took my time and made sure that I colored the correct bubbles. I then went back through and made sure I entered what I thought I had entered. I had. Once I was finished, I had to wait outside while someone checked my test. This was a long wait. Not so much in time, but more because your head starts to wonder if I answered this or that correctly. 18 hours later… or 5 minutes, depending on which side of the test you were on, a man came out and shook my hand and said congratulations. I passed my HAM test.
I took the Technicians and only missed 1. I was then offered to take the General test. It was the same process… I took it and only missed 5.. YES! Finally they offered to let me take the extra test. This is the highest level one can go, but there was no way I could even begin to prepare for that. I was honest with and told them that I had not even the foggiest of an idea what might be in there. They said it was fine and I could try it if I wanted. Having nothing to loose, as I had already succeeded in what I went there to do, I took it. It was pretty severe. Deepest and darkest end of the pool sort of stuff. I went very slowly trying to find anything that might give me a clue as to what might be a correct answer, but this stuff was way over my head. I went out and waited again. Finally the man came back out. How did I do? He grinned and said I missed half the questions. Ha. Not good. But he said that General was something to be proud of, especially given my study time, and two tests in one day. He didn’t have to tell me this, but I was glad he did. I was pretty happy about it, but I think I am going to go for that Extra license soon.
Every so often we have to update our videos at work. This could be for a myriad of reasons… updating titles on some of the people speaking, updating stats, or even just to update the copyright which we have to do every couple of years. Unfortunately this means that this content is out of the reach of the general public. It’s part of the biz. If you want to talk about my work, or have a question about something, please don’t hesitate to ask. Hopefully this is only a temporary pull.
Sometimes a tragic event happens in life which rocks your world to the point where everyday existence seems like chaos. Eventually, no matter what, you have to get back going and start living again. You can’t let this ‘thing’ become an excuse to stop, or said tragedy event becomes even greater.
January 2015 was one of the hardest months in my life. My brother (sibling, co-conspirator, best friend) took his life. I never saw this coming, and I am still, in some ways, coming to grips with it. I am told, “You will never get over it. You will just learn how to deal with it and move on”. I hated those words at first, but now, I get it (sort of). Btw, this is a really harsh thing to say to a person who is waking through this… consider your words.
The number of people who attended my brother’s funeral was staggering. I only knew him as my brother, in the relationship that brothers share, but living in separate states, and different circles of friends, you don’t necessarily know the whole… ‘them’. I got to meet the person he was, through the stories of his friends, many of which have become good friends to me.
Needless to say, last year I was pretty well wrecked. Fortunatly I have a solid family, and I love what I do for a living (editing, graphics animation, sound, photography…). So, I really focused on my family, my work, and not much else.
My brother was a good guy. We loved many of the same things. We both have a love films which made you think a little. We loved a lot of the same music. He wrote and directed many short films, several of which won awards. He was part of a fantastic community of film buffs as well. He was a musician, and played with an Irish band in a legit Irish pubs, and music festivals. While we don’t have much Irish in us by blood, but we make up for it in heart. Like most sibling relationships, we always pissed each other off, but that’s how brothers are, right? That said, I really miss him a lot. Sláinte bro!
Most of the things I did for fun were put aside as nothing seemed like much fun (this blog included). The day he died, I was working on a new circuit board for the CNC. I was within a half hour from finishing soldering up the prototype when the call came. I have not touched the board since. I have not been able to listen to the music that was playing at the time either. There’s a lot of things like that which I haven’t been able to go near. While I am not a writer by nature, I do enjoy writing on here when I get the chance. I have done a few projects here and there, but nothing like my usual self. The past few months I have been trying to get myself back up to speed again. I can not and will not let his decision take the life out of me. It’s been hard to get to the point to say that without guilt.
While I enjoy writing, I enjoy ‘doing’ even more, and while I don’t update regularly, it’s generally because I am out and doing… well… ‘stuff’. I usually try to write in the slower times, or during long drives. One thing I have never really done on the blog, is write about any of my deeper projects while I am actually working on them. I usually wait till the end of the project, and then document it. But I have read a few other blogs where they were documenting their project as they went. I really liked this as you see the whole process, mistakes and all. If you have read anything on this blog, you know I am not afraid of mistakes, they are a part of creating. Well, I am a little afraid of mistakes. Mistakes suck… But important none the less. I have several huge projects which have been bubbling for many years which don’t have the first thing written about them, and they are really cool. If I don’t put it down somewhere, I’ll loose it, and I don’t want to loose these experiences. So… while perhaps they might be smaller posts, hopefully I will get more out there in the way of updates. I am also going to try to document several of these older larger projects (the ongoing type) and place them where they belong in the timeline of the blog, but I will link to them from the current time. My earlier life was full of thoughts that there will be time for this or that later. This has been shaken to the core, and the understanding that anyone can be gone in an instant it loud and clear in my mind. So, there’s no time to loose. Time to get busy.
Along these thoughts… To anyone dealing with depression, I am sorry. I never knew the depths of which my brother was going through. I wish I did. I still don’t understand how reaching out to your own brother, or anyone for help, is harder than taking your life, yet here we are. So… please hear me. If you are fighting this same thing. Talk to someone. You might feel like you are alone, but I assure you, you’re not. I know, or better said, -I have learned- that what you face is nearly impossible some days. It’s okay to have bad days. But even a bad day here is better than a day without you here. I’ll say this too… If you think that suicide is a way of ending the pain, it’s not. To be blunt, it just takes the pain, amplifies it, and distributes it across everyone who ever loved you. More, it instills the nagging questions of ‘why?’. There are no good answers which make things better. It’s just learning how to live with the missing life long companion. So… Please. Talk to someone.
So… this is one of those posts I have been needing to do for a long time, but when I looked at the project I kept asking where the heck does one even start? The majority of this was built around May of 2015 and I will be back dating this post to reflect that. The wording is written as if I wrote it back then to keep the tenses at least a little bit proper, but as usual, grammar police be warned… Dangerous reading ahead. Also, this was a project that had many areas being developed at the same time, so while I will try to write things as linear as possible, it will not be, it can’t be, and it wasn’t. Now on with the show…
A couple of years ago I built a camera slider for my brother based on a design by J.G. Pastorjak. While I was doing the research about how to build it, I decided to build one for myself as well. This was a simple slider which worked very well, provided some wonderfully smooth video, and I have used it a lot. The time-lapse community have made several advances using sliders. Shots in which the camera is actually moving in during the time-lapsed event. It’s very complex and beautiful movement. While I suppose this could be done without computer / machine control, someone is going to have a really bad day trying to do it. I have also been following the work of some of the higher end commercial slider systems which not only moved the camera within the time-lapse, but it also included automated pan and tilt. These were the sorts of goals I wanted design and work for. While I suppose I could have saved some money and time and just bought the dern’d thing, that’s not how I tick. More, I didn’t want to be limited by the features that someone else dictated to me based upon some sort of pricing structure. I want to understand it, explore it, and most importantly make it my own. I did a ton of researching and reading trying to find answers and solutions. While I found a few people who have ventured down this alleyway, I couldn’t find anything like what I was personally imagining, or wanting.
A few items which I wanted (the basics)…
Pan, tilt, and slider (duh)
Must be self contained.
Must be able to be used for both video and stills (time-lapse).
Should be easily convertible for new features.
Should be smallish in size.
In stills mode, the controller will also trigger the camera shutter.
I wanted to reuse as much as I could of the slider I had originally built.
Then there were the constant burning questions which gummed up the process…
What type of motors should I use? Stepper motors, standard motors with some sort of encoders, servos?
Does the slider engage with a ball screw, rack & pinion gears, or belt feed?
What materials would I use for the slider, the deck, the moving bits?
How would the pan and tilt actually work? Belt, worm gear, direct drive?
If it was self contained, how would I control it (without needing a laptop)?
How would I power it?
How would I connect it to my camera (shutter release interface)?
I usually have 4 – 5 projects brewing at any given time. Probably more than that if I am being honest. Most of the time I will hit some cliff of impossibility or creative wall and stop that project for a while. I will then work on another while I mull over the issue. I am not an engineer by trade, but my engineer friends tell me I am one, just minus the degree. It’s just how my mind works. These problems are like brain puzzles. There has to be a solution, so sometimes I will plow into a project without fully knowing if it will pan out (pun not intended). This project was no different. There were some pretty hard issues to resolve here. It covered so many areas of discipline… Mechanical, structural, electronics, programing, and general artistic aesthetic.
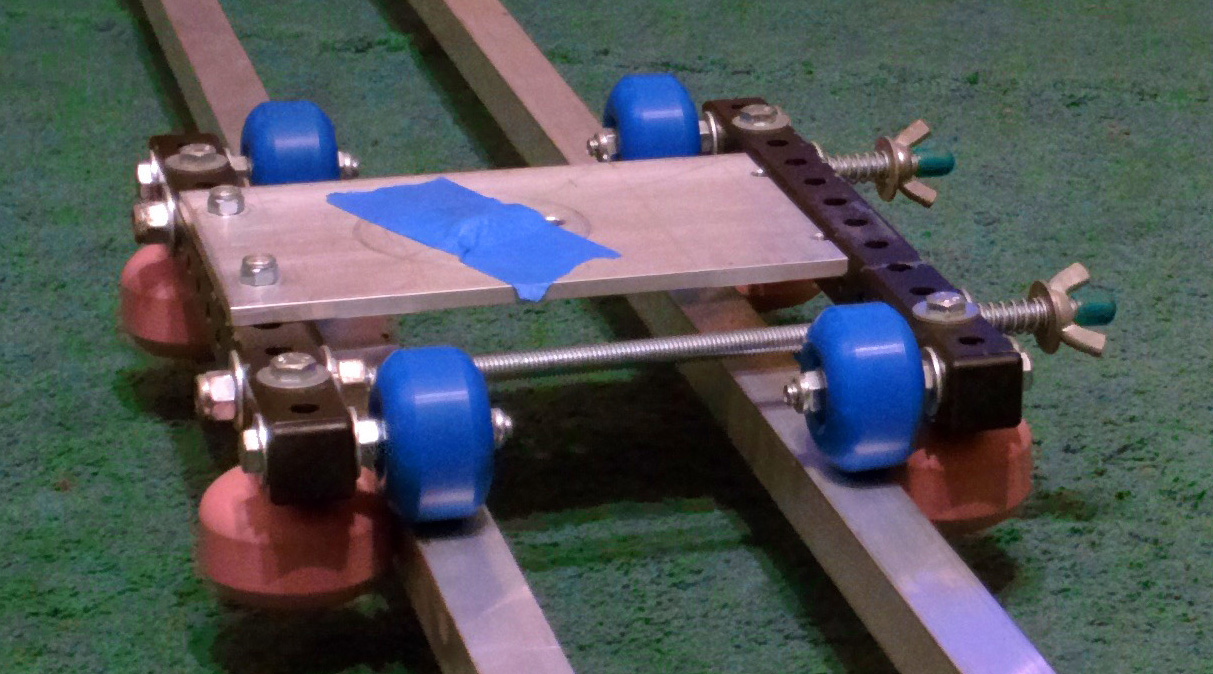
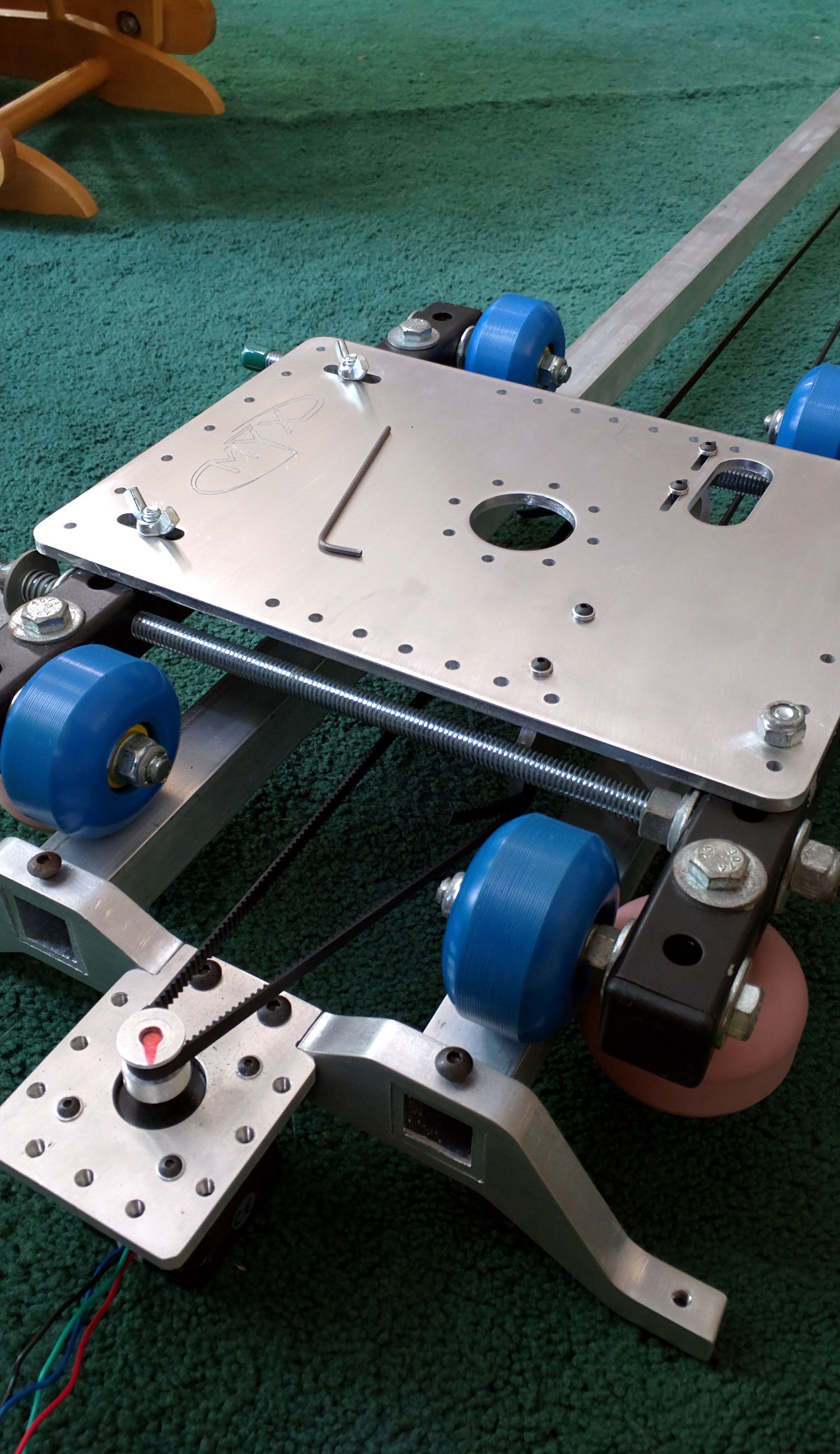
My thinking was that I needed to work on the slider trolly portion (called the ‘slider’ from here on) first because if there’s no slider, there’s nowhere to place the motors, or camera. Pretty straight forward, right? I am sure that this is going to start sounding very circular, but stick with me. One issue I had with the original slider is that it could get a little wobbly if I got some weight on it. So I decided to re-deck the slider for extra rigidity. I started to think about what size the deck would be and realized that the deck would be based upon the distance between the rails + the width of the wheels + a little extra for fine tuning. It then occurred to me that if I am cutting the deck out, I also need to think through where the pan and tilt would live on that deck. If the pan and tilt are on the slider, then the motors will also be on the slider. If the motors are on there, how do I get wires to it. Wait… if it has wires and it is spinning, how do I keep them from getting caught up on itself. In the end, I realized that I was going to be designing the whole pan, tilt, deck, and slider assembly at the same time.
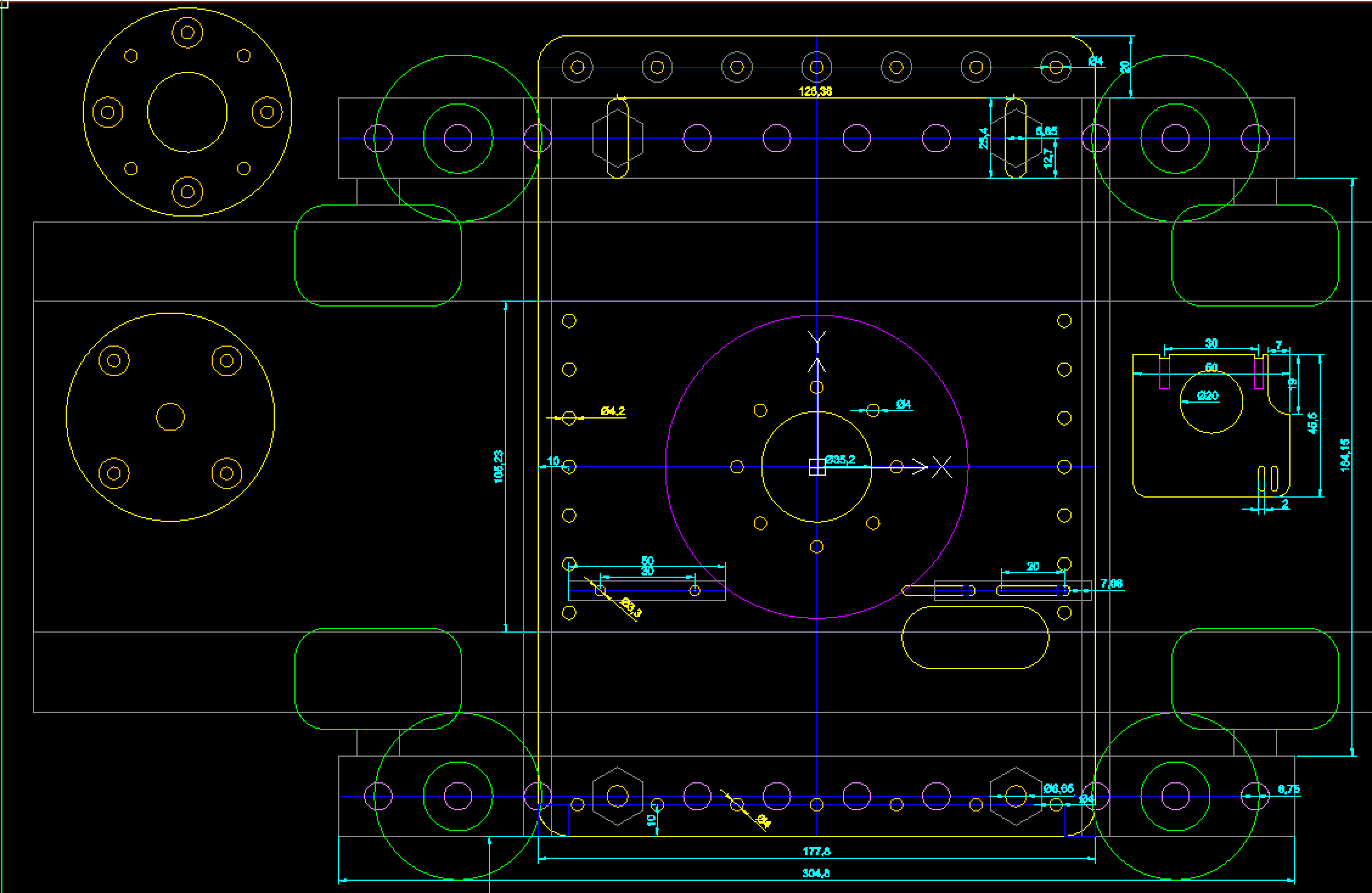
While the Shapeoko II is an amazing machine and is completely capable of making beautiful things, it’s not a exactly speed burner. When cutting aluminum, parts could take up to 4 hours to cut out. With that time commitment, I didn’t want to remake parts if I could help it. With this in mind, there was a lot of benefit of thinking through the whole mechanism. I was using Draftsight for the design. Sometimes the hardest part is starting. Where do you start? Eventually I just started placing design ideas with rough spacing. Once I started seeing something I liked, I then started taking measurements and dialing it in. This of course meant that lots of things needed to shift, but the idea was there.
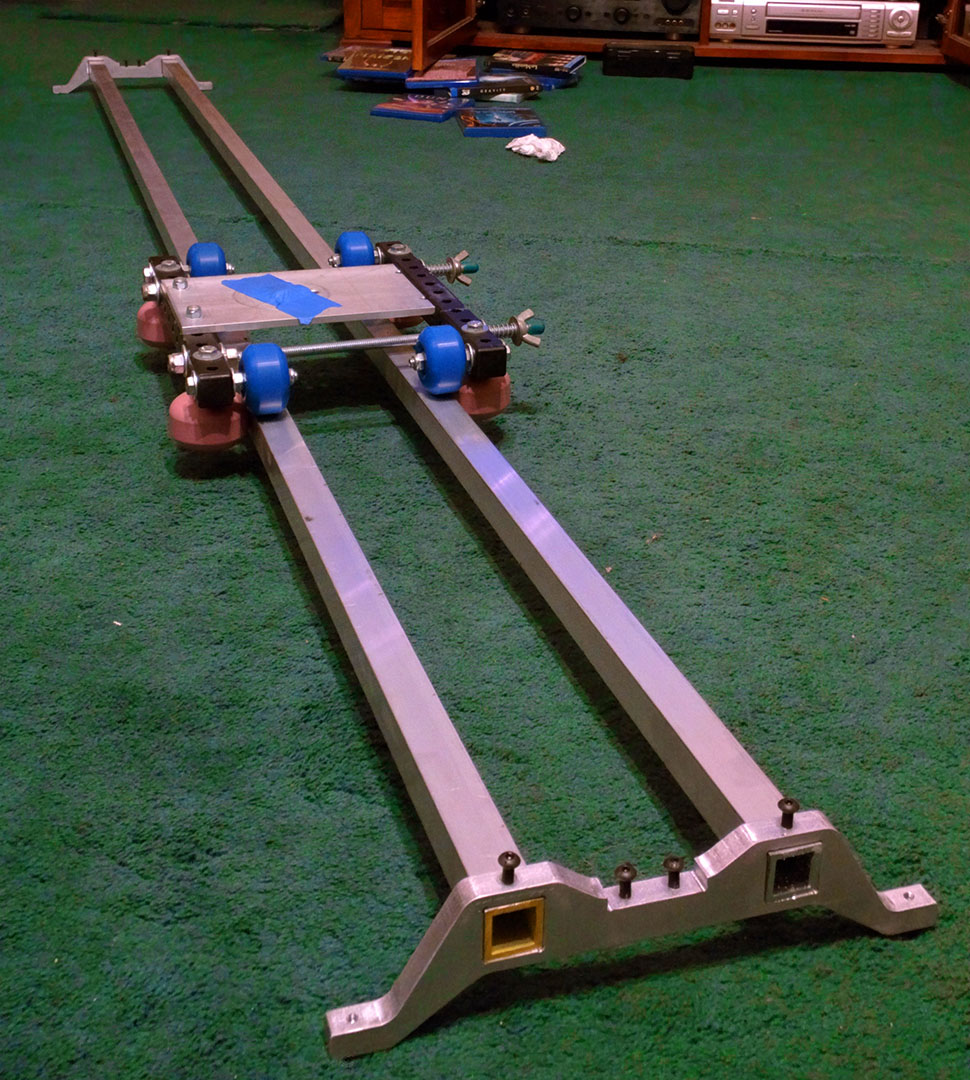
I started work on the base of the slider system. This means the end caps which would support the rails on which the slider would slide… upon. My previous slider rails were 1 inch square aluminum tubes held together with 2 – 6 inch pieces of “all thread”. This put a 3 inch space between the rails. While this worked, as I mentioned earlier, it had the tendency to be a bit wobbly once you got a camera and head on it. To make things worse, the original rails were the stuff you find at Home Depot which had very thin walls and HD don’t tell you what grade of aluminum it is (several threads on the internetwebz says box stores are selling generic low grade 5052). I called and talked to a woman who said she would find out and get back to me (I am still waiting). I bought a new set of rails from Metal Supermarkets which are quite thick, and if the web is correct, a superior grade of aluminum (6061). I bought the new rails for less than the cost of the thin stuff from the HD (makes one think).
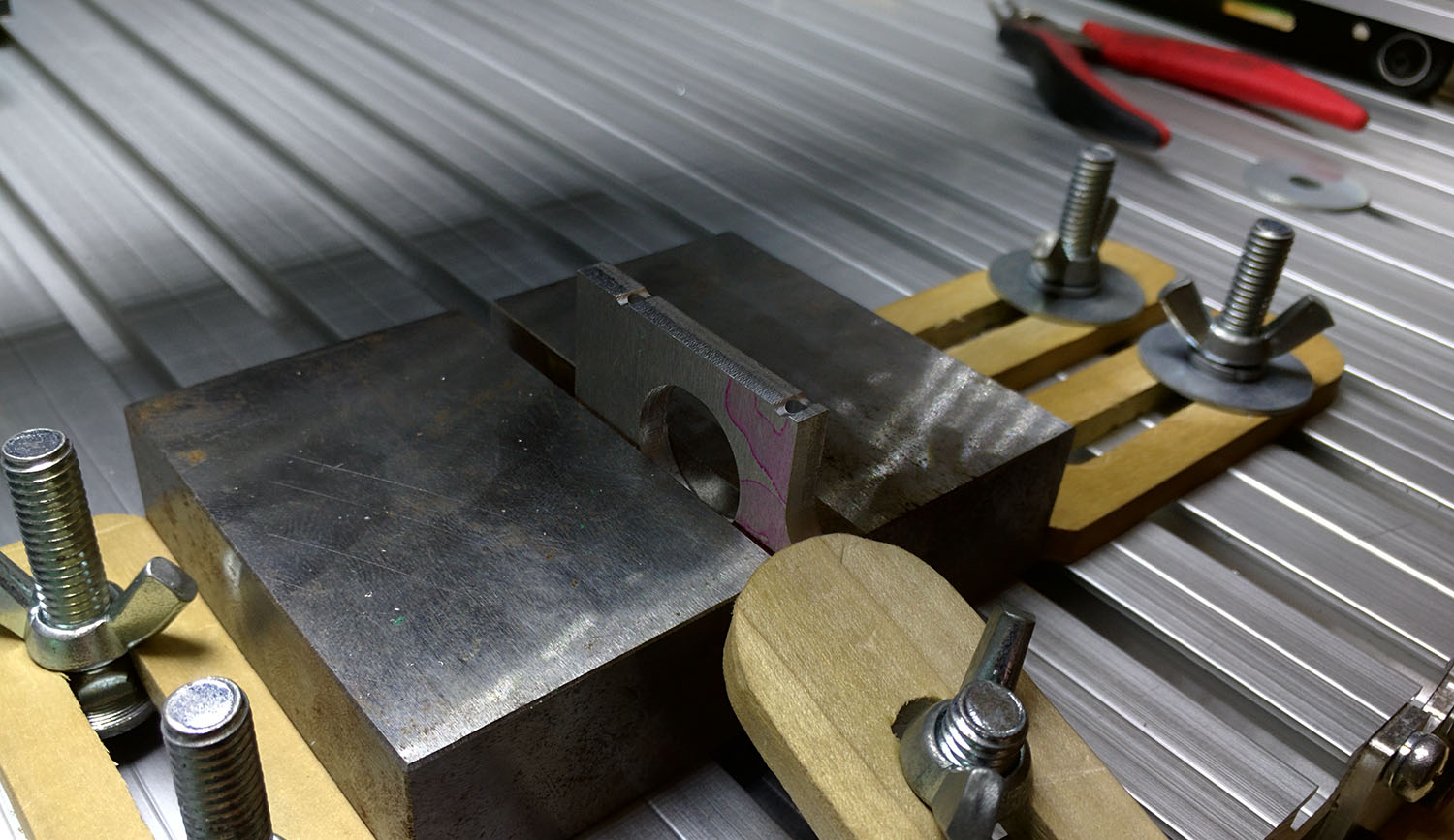
While it is not a huge increase, I spread the gap between the rails from 3 inches to 4 inches, hoping that the strength and extra width would make things more rigid. The rails are held together with custom aluminum brackets or end caps (no, I haven’t come up with an official name for them). These brackets were milled out of 6061 aluminum. Actually I’ll just place it here… everything on this project was 6061. It’s super strong, light weight, and can be machined well. The caps are a half inch thick which is probably a little bit overkill, but I don’t have to worry about them bending anytime soon.
The caps have threaded holes in the leg sections in which leveling screws could be placed to allow the slider to be stabilized on just about any surface. They also have a set of holes for M5 screws to tighten down on to the rails, locking them in place. This is important so I can break the system down quickly and easily. There’s a notch cut out dead center to receive various types of mounts which can be screwed into (motor, pulley, etc.). I didn’t build any of these additions to be permanent (although they could be) as I wanted a test bed for further ideas after the slider system was complete. The pulley end plates have a recessed cut pocket for a bearing and a small hole in the center for a M5 screw to pass, through a geared pulley in between, through a second bearing, through the top plate which is then secured with a washer and locknut. There are 3 holes around the outside for m5 screws and a bushing. Once the bushings are in place the whole thing sandwiches together and locks tight. The other end cap holds a fixture which holds the slider stepper motor. Again, this is attached via 2 – M5 screws.
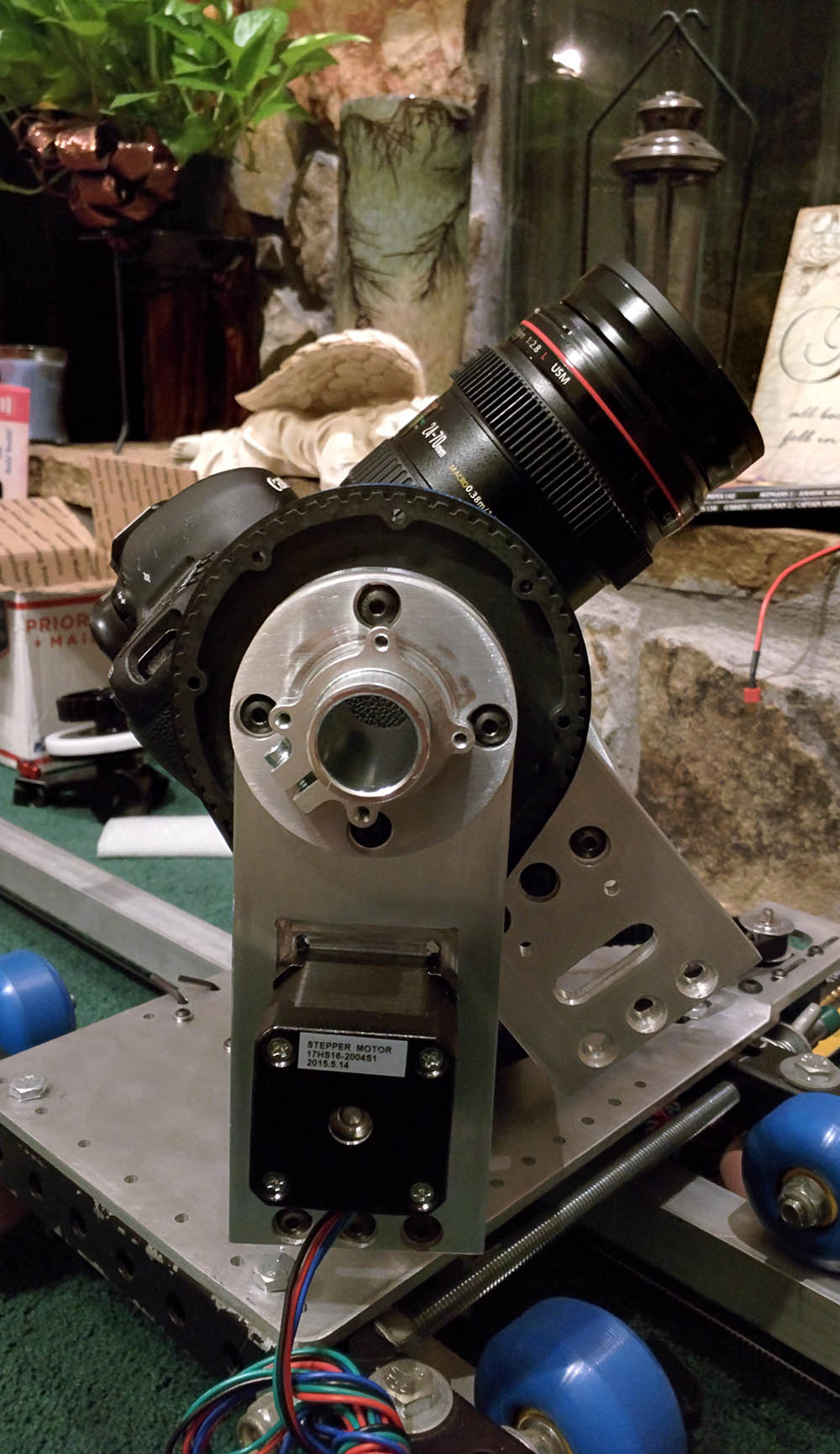
I am not going to go much into the angst and back and forth I went through trying to make some of my final decisions on various various parts unless it is absolutely necessary. Otherwise this will become a silly long blog post (which is already a bit too long), and you dear reader would probably need some serious therapy as a result. I settled on using stepper motors. Steppers offered me the assurance of repeatability and strength. For some effects work I am imagining, I will need to repeat the exact same move, over and over, many times. I need the camera to match up both in time and spatially, so exact repeatability is critical. The steppers I am using are Nema 17 Bipolar 64oz./in. and provide 200 steps per revolution. This accuracy can be expanded by microstepping which splits each main step into smaller sub steps. The number of microsteps really comes down to the driver one chooses to use. Initially, getting up and running, I am using some of the super cheap knock off A4988 type drivers (There’s a lot of money falling into this project, so inexpensive while prototyping, yeah?). These are suppose to provide up to 16X or 3200 microsteps per revolution. The only problem with using microstepping is that I loose some holding torque when using higher levels of microstepping. This is not a problem if the slider is on a level surface, but it could potentially slip if I am trying to have the camera climb. So… build it, see what it can do, and update it as necessary.
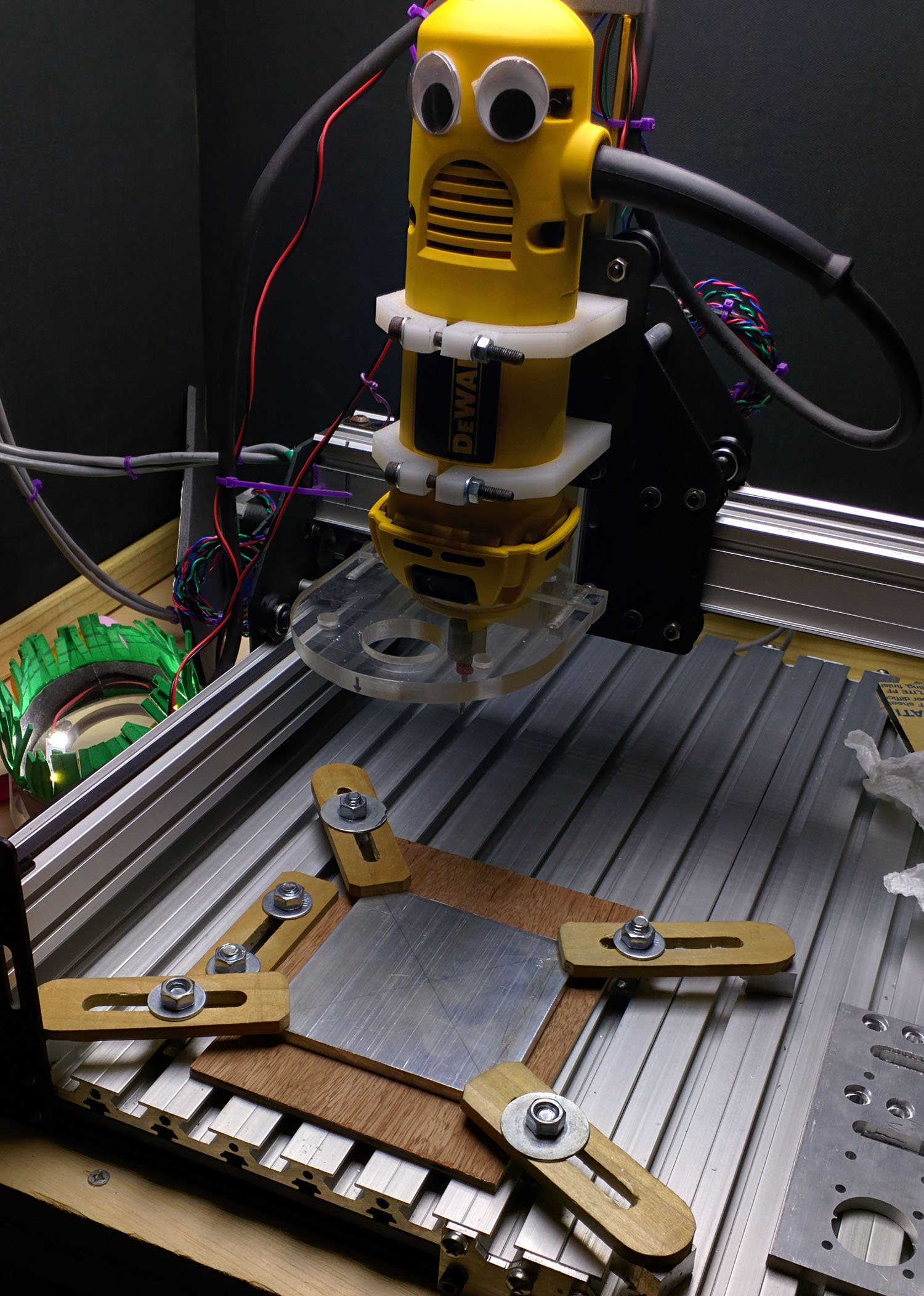
At this point it was time to get at least a basic amount of the automation work started with the current slider and the new rails. Clearly this would be a microcontroller driven thing. My go to microcontroller is of course the Arduino. I knew it would be more than capable of the movement as that’s what’s driving my Shapeoko, and if you think about it, this is really just a CNC machine with a camera attached. Getting the stepper going was not too hard, while getting it moving smoothly, was. Let me rephrase, the linear movement was perfectly smooth. It was just getting an object to ramp into up into motion without a heavy jerk was somewhat problematic. Software can be fixed. Mechanical issues, would have needed to be tweaked and rebuilt. Being that this was a software thing, I moved on. Eventually I found an Arduino library that let me set a specific distance and it would ease in and out of the movement. The video below shows that progress. I am sorry for the crap quality, but at that moment, it was very exciting and I wanted to capture it’s first real steps. The belt was attached by being sandwiched between a couple washers and screwed tight. A more permanent solution was designed for the new deck, but hadn’t been cut out yet.
Below is a video of the first bits I shot with a camera, the new end caps, new rails, pulley and motor mount, but with previous slider. I was grilling out on back porch, so I figured I would take out slider and give it a try in between burger flips. While it’s not an Oscar winner (nor all that entertaining), you can see that it is very smooth. Speed was not the goal here. I was curious (concerned) to that I would see stutter(ish) motion artifacts at really slow speeds caused by the stepper’s movement which by it’s nature is based upon pulses. Would this translate into the video? I was really happy to find that it was buttery smooth. I will point out that at about 13 seconds into the video, you can see the image shake. This is a result of the sudden jerk into motion when the slider started to move. This was before putting on the new deck, so effectively the camera was suspended over the center of the slider (only connected from one of the sides). I had to detach the deck from the other wheel fixture due to the wider width of the gap between the rails. The new deck helps this a lot, but again, this is why I need to get some easing worked into the motion portion of the programming. Smooth movement from a stop, up to speed, then smooth slow down, and stop.
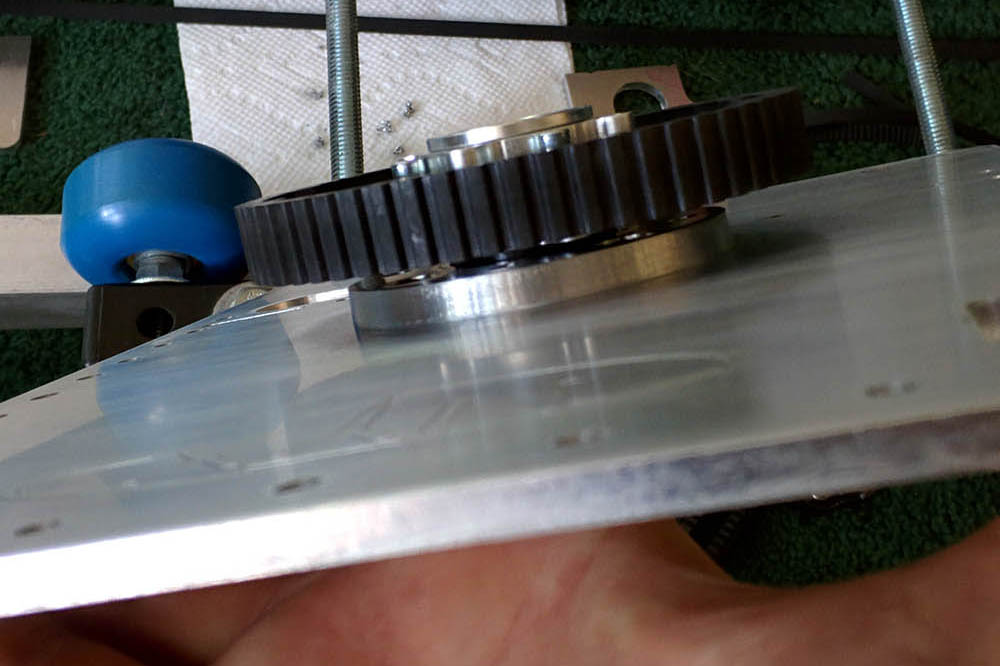
The motors somehow need to connect to the slider if things are going to move, right? I decided that it would be belted gears. The idea being that I could tension the gears and motors after building everything. I can also re-gear things if the movement is too fast or slow. While I am all for building my own things, there are some items in which I felt there was no need to reinvent the wheel. Gears, pulleys, and belts need to be exact for things to run smoothly. Most of these types of items I purchased from Servo City as they have some really beautiful stuff. Everything else was built from scratch.
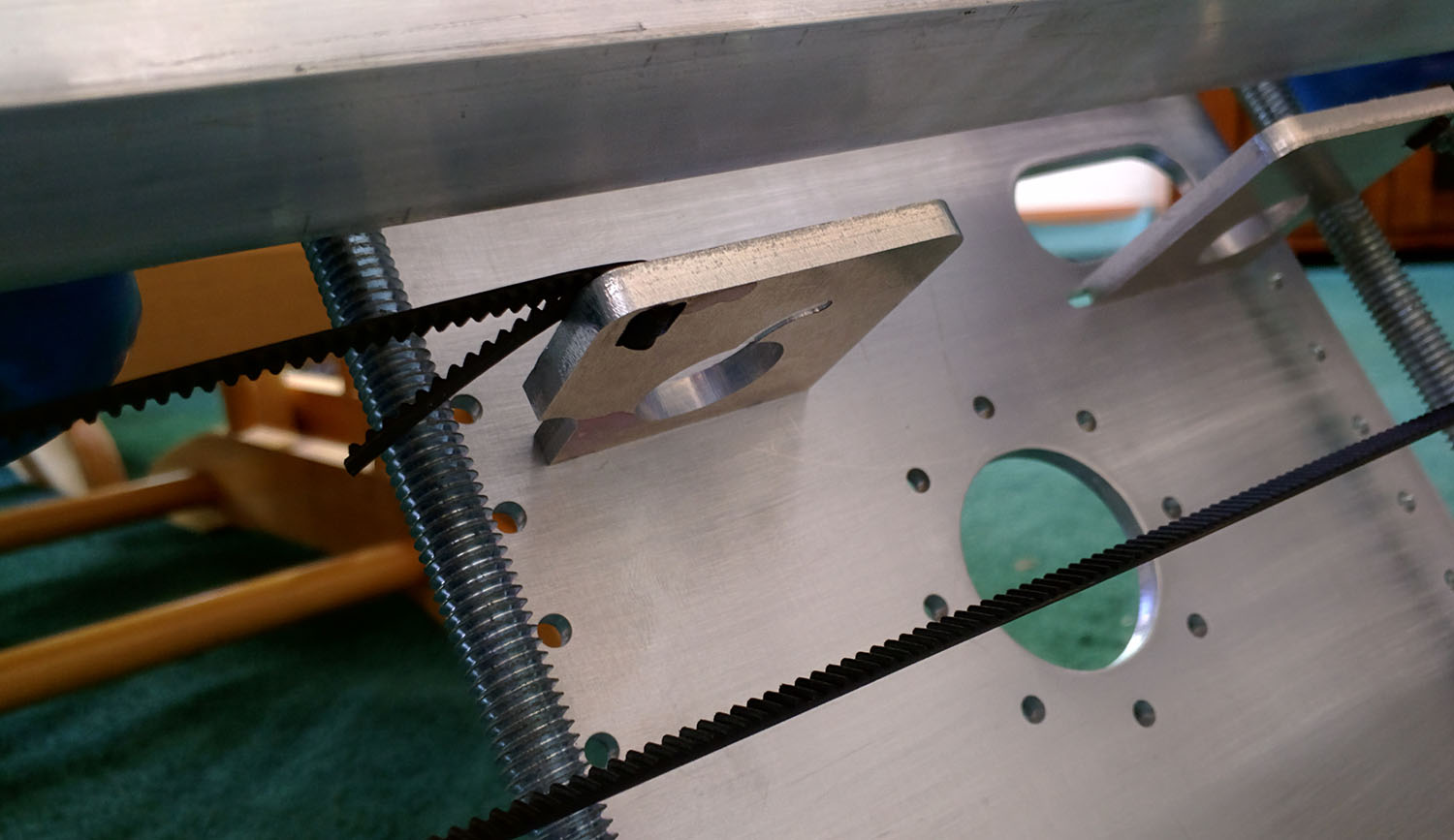
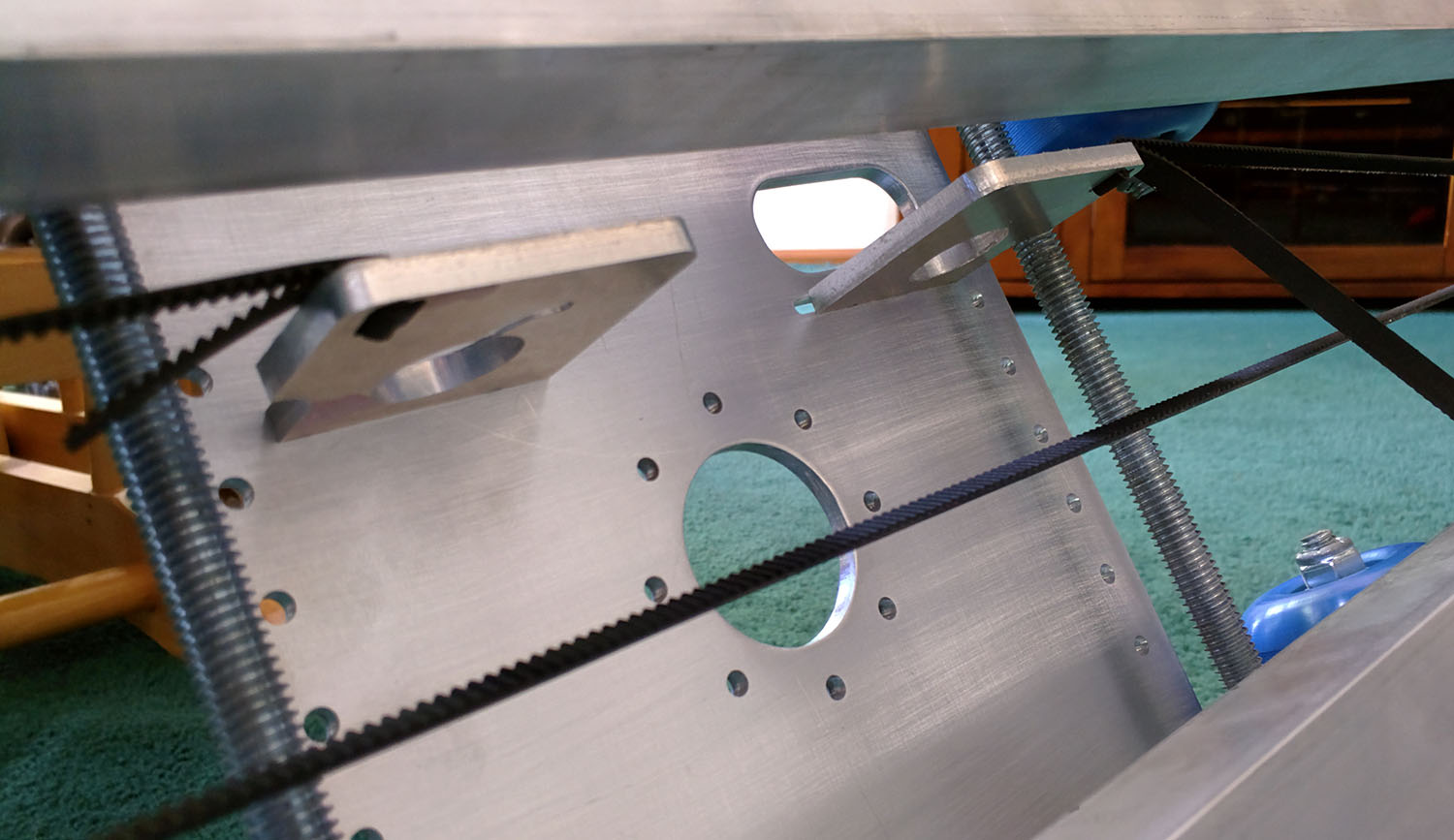
The center point which ties everything together, is the deck. The deck was designed with attach points all around it in the form of tapped holes, so that there would be gobs of options. While I am not sure if this was a good idea or not yet (only time will tell), but I made all the hole spacing on one deck axis in inches, and millimeters in the other. My thinking is that perhaps someone would produce something I might want to attach, so why not try to make it somewhat universal. I have been trying to keep everything I build as metric, just because it’s wonderful to work with, but made an exception here. The deck also has attachment points for the wheel rigs. There are points for the belt connection plates and a finger hole for tensioning them. The belt connection plates are what physically attach the slider to the stepper. The belt is easily fed through these slots in the plate, but once the belt is tensioned, there’s no worry of it slipping back out. These are held in place with M3 screws.
I am currently shooting with the Canon 5D mkIII and Panasonic GH4, so I have built the slider around the 5D as it was the bigger of the two. This thing is going to be carrying a lot of wiring which has to reach from the outside the slider all the way up through the pan and tilt arms and up to the camera. I concocted a number of ways to do this, but they were all limited in some way.
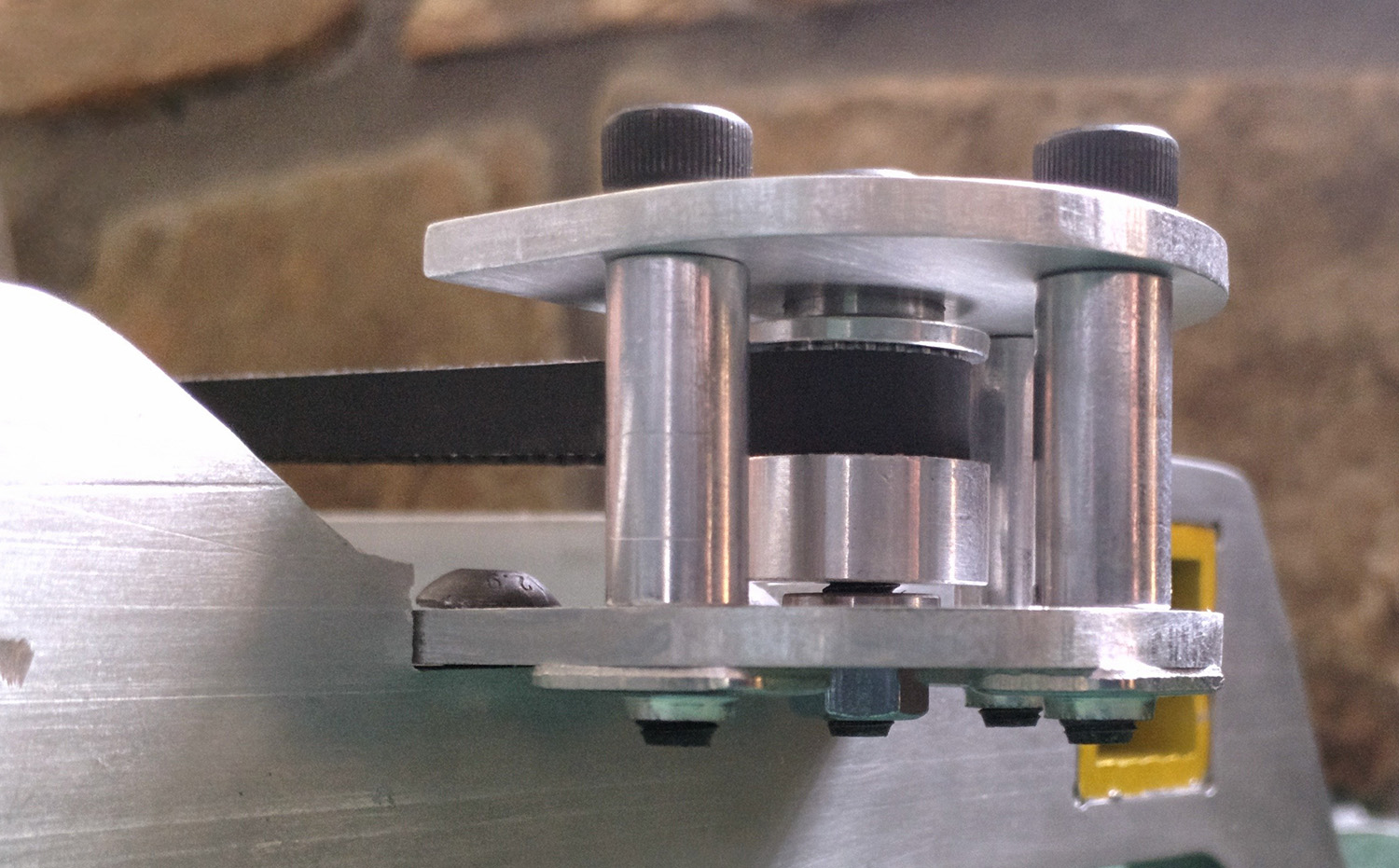
Then I had an ‘aha’ moment. Adafruit announced a slipring wiring harness. While this product didn’t make it very far in my design, it was the idea of the wires being integrated into rotational axis that got me. The reason being is that I could do a couple of rotations without causing harm. I started digging into the ServoCity site and on paper put together a stack of items which would provide this cored rotation.
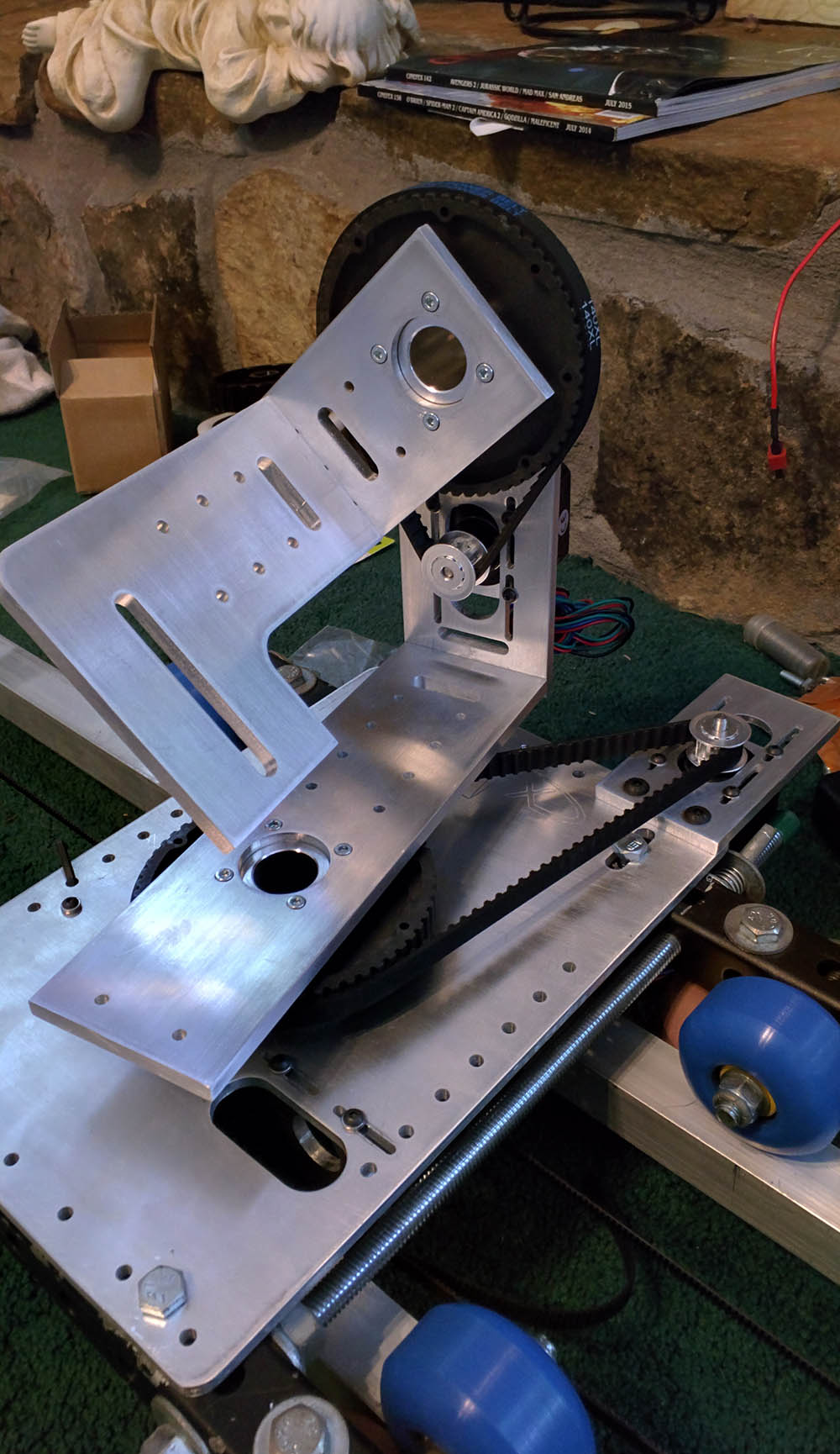
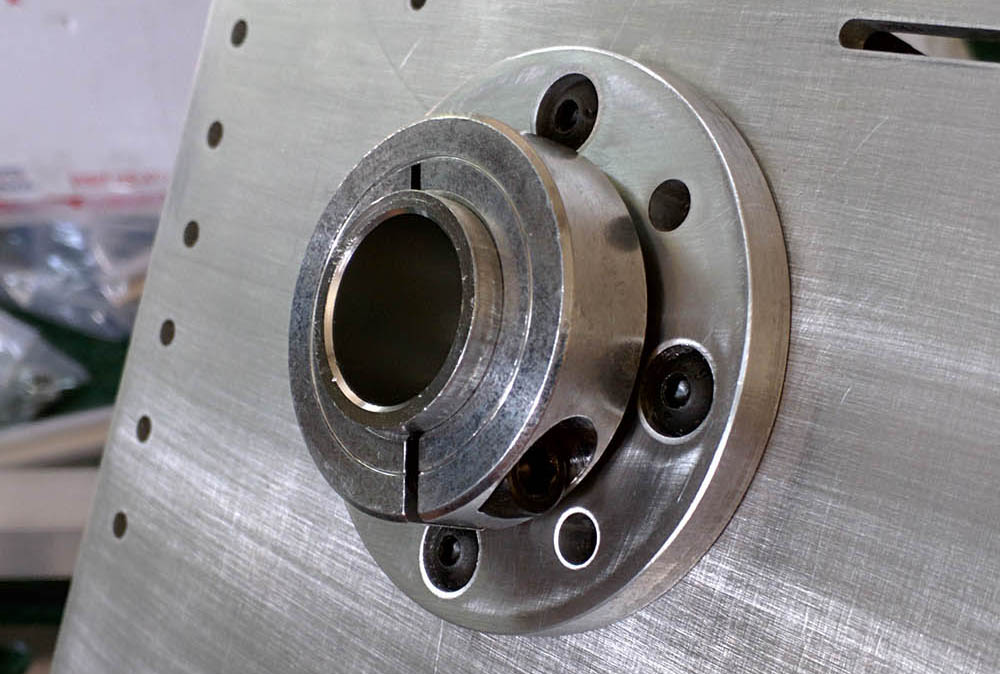
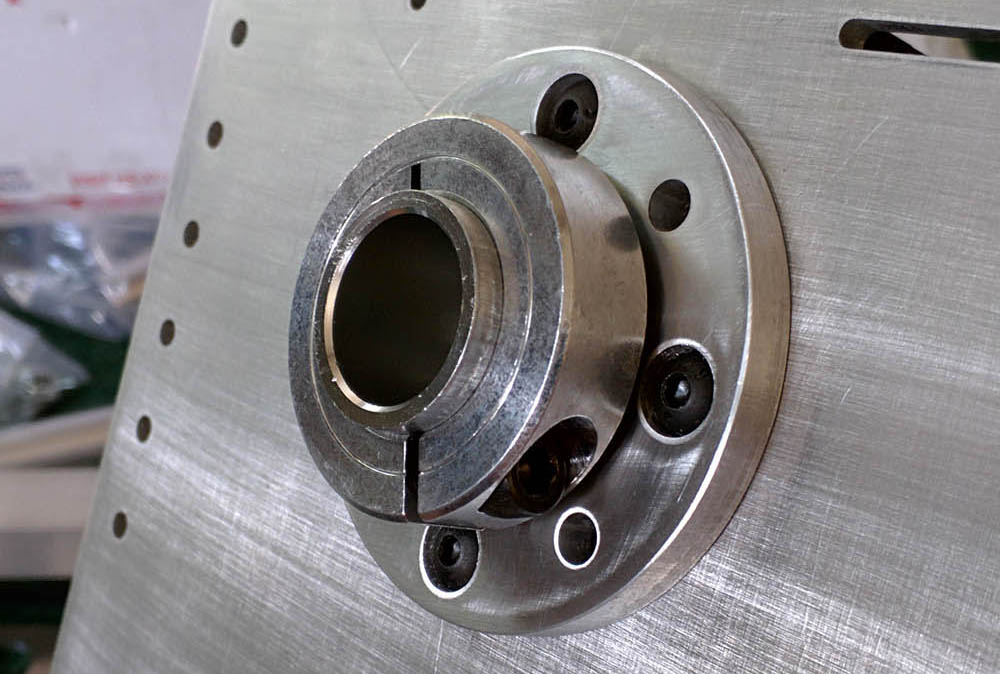
The item the brought it all together was a set of crazy thin bearings with a huge center bore. These were used on both the pan and the tilt axis. The tubes were flanged on one end which provided a base to which everything could stack and lock to. I will try to explain the stack, but it’s a little convoluted in text. For the rotational base, the tube was fed through a hub which would lock onto the tube. The tube is passed through a large pulley and the hub is screwed to that. The tube is then passed through a very thin plastic washer, and then one of the ultra thin bearings. There are 2 milled plates which sit on top and underneath the slider deck. These plates have pockets cut to exactly fit these bearings. These plates are bolted to the deck to provide a secure rotational center. The tube coming out the other side of the slider deck and bearing plate is then passed through the second bearing, through a plastic washer, then the bottom hub lock. The only difference with the tilt axis is that the tube passes through another inside riser piece which ultimately connects to the camera plate. I am sure that this was a bit hard to follow, so hopefully the photos spell it out a bit more clearly.
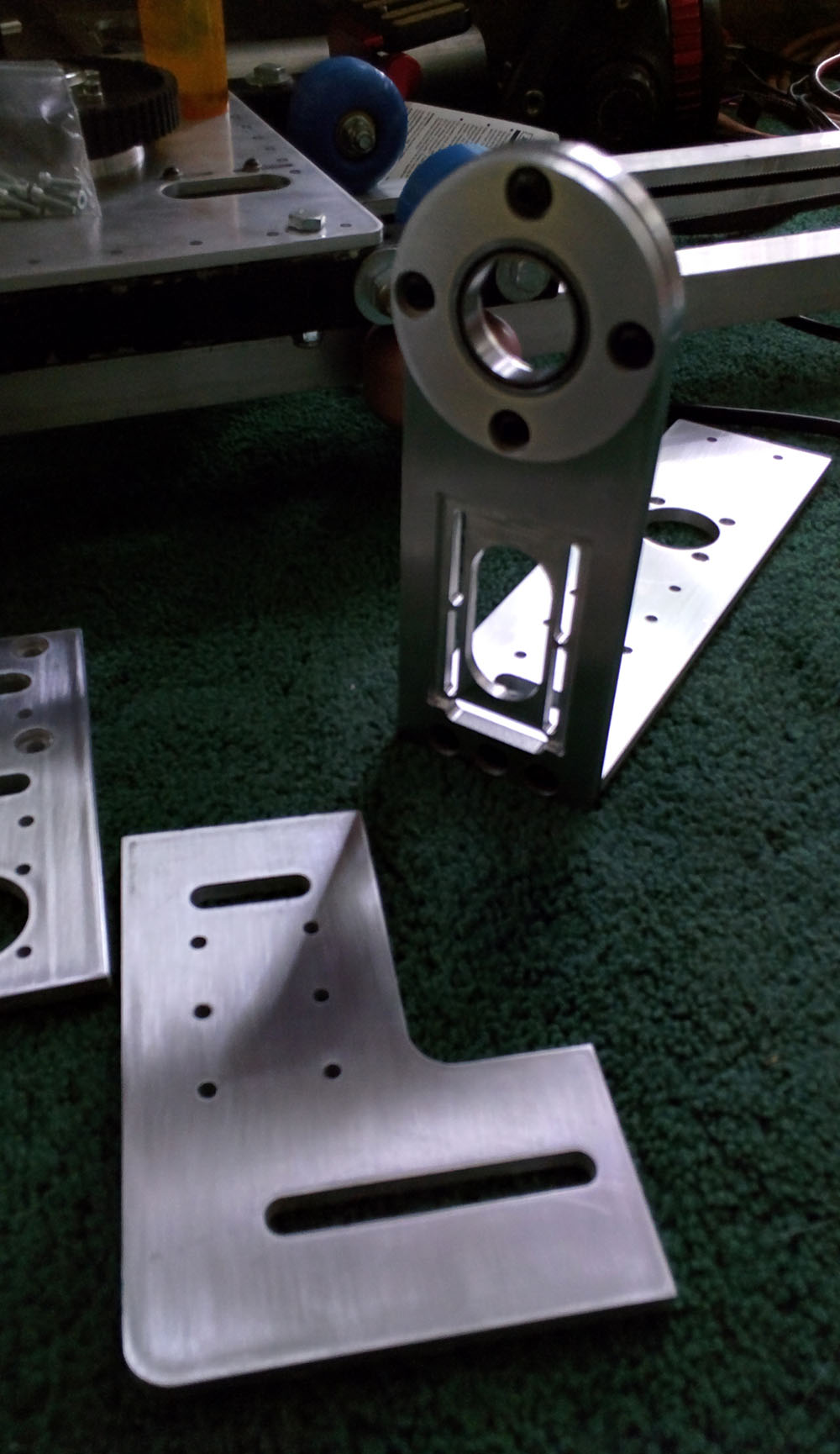
I wanted the pan to around the nodal center of the lens. If the lens sits too far forward, a pan can feel more like a swing. Being that different lenses would have different points, I have built in a a slot to allow for forward, and backward movement. I also built in the ability to put the camera plate at several height levels so I can change how the camera tumbles, or allow space for an extended battery pack. Basically I built in a ton of options I which I might or might not need, but wanted the option. I also added many spots for other things to be attached, and wires to be strapped to. Zip ties will keep things wired flat to the plates and I have cut slots which the wires can cut back and forth to stay out of the way of the rotating arms. I am making this sound somewhat easy, and it wasn’t. There were several attempts on a couple of these parts which ended in sadness due to unforeseen spacing issues, bearing pocket being on the wrong side of the piece (I was trying to do some 2 sided milling which is quite difficult to do and keep things perfectly aligned).
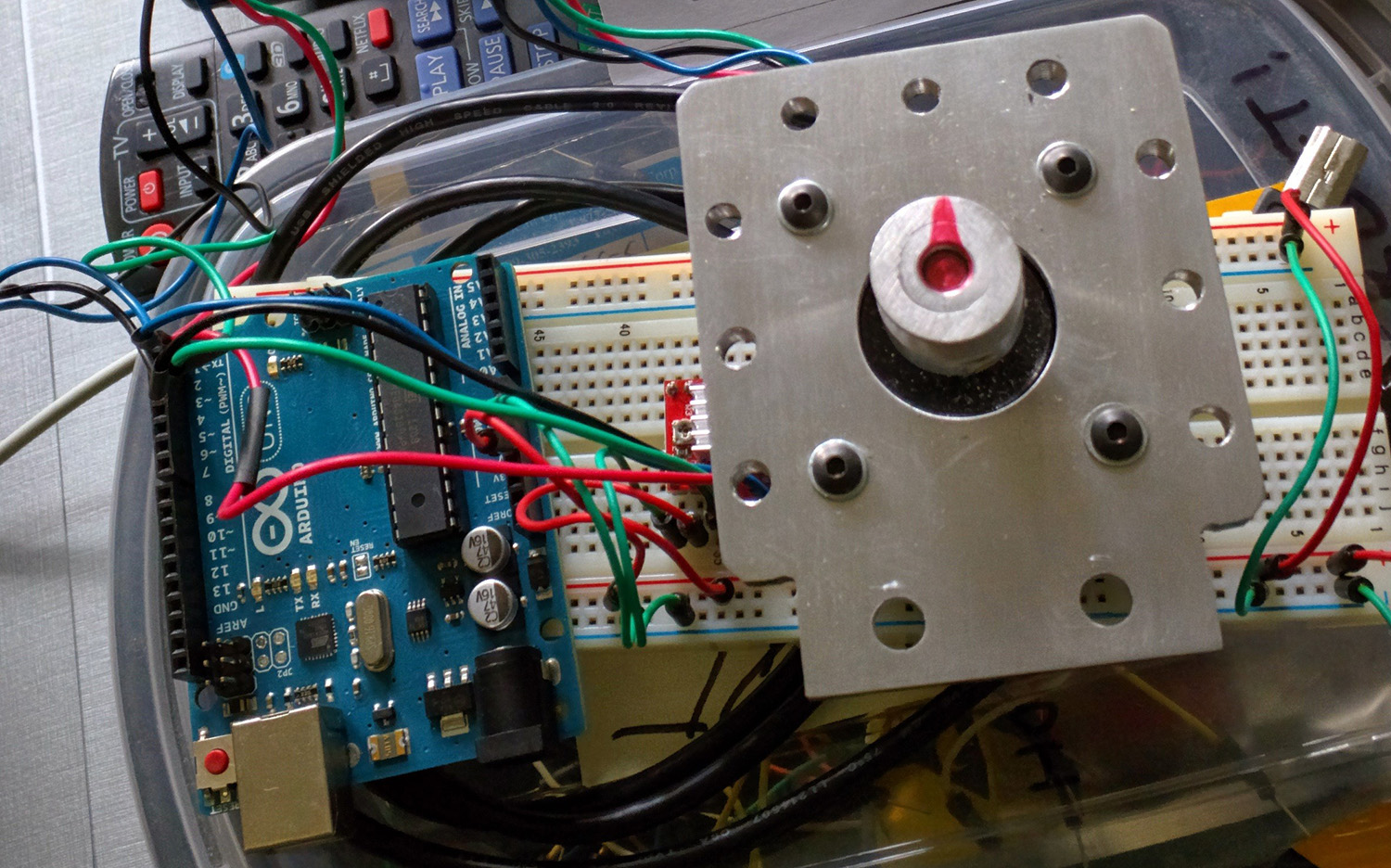
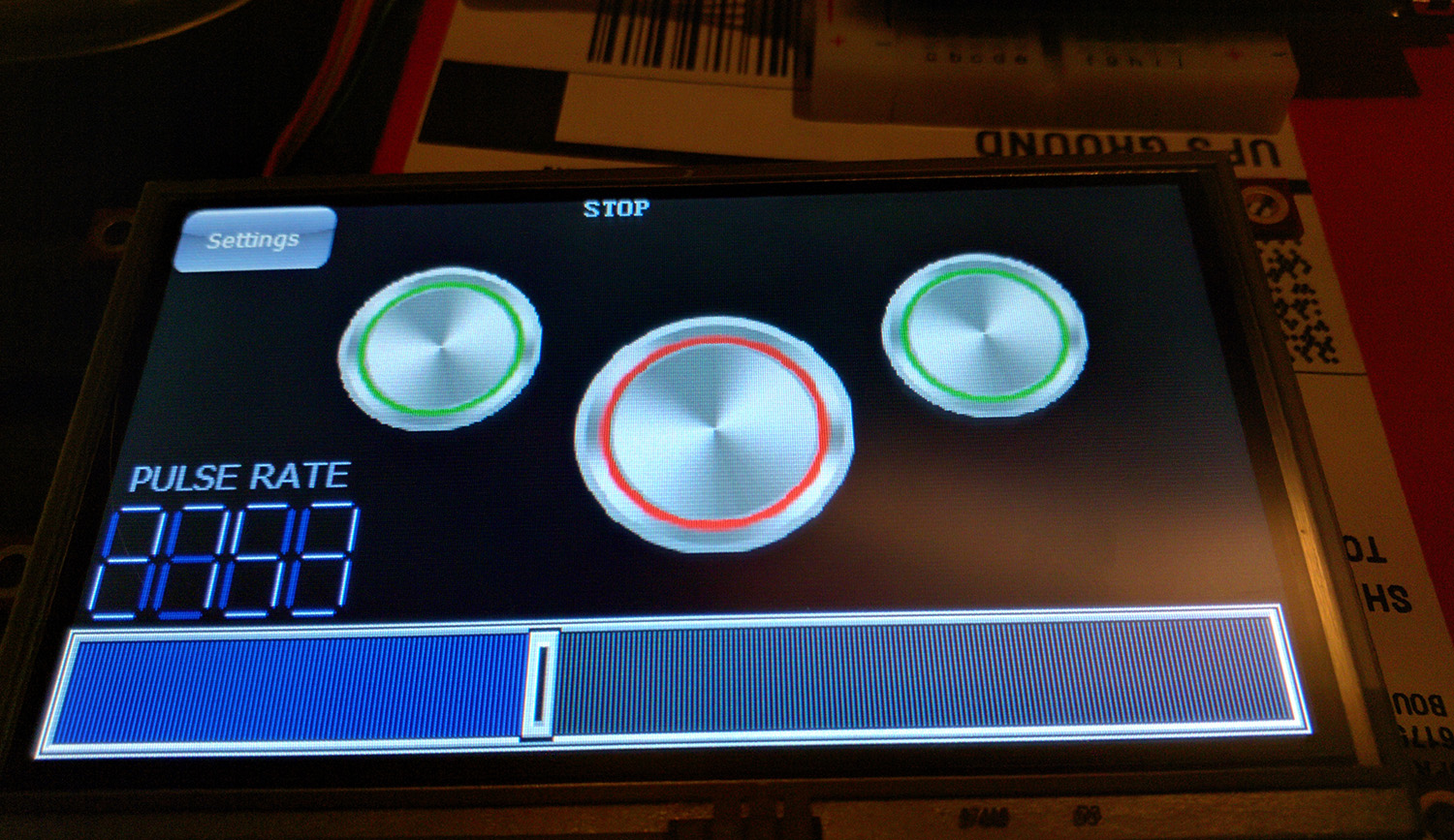
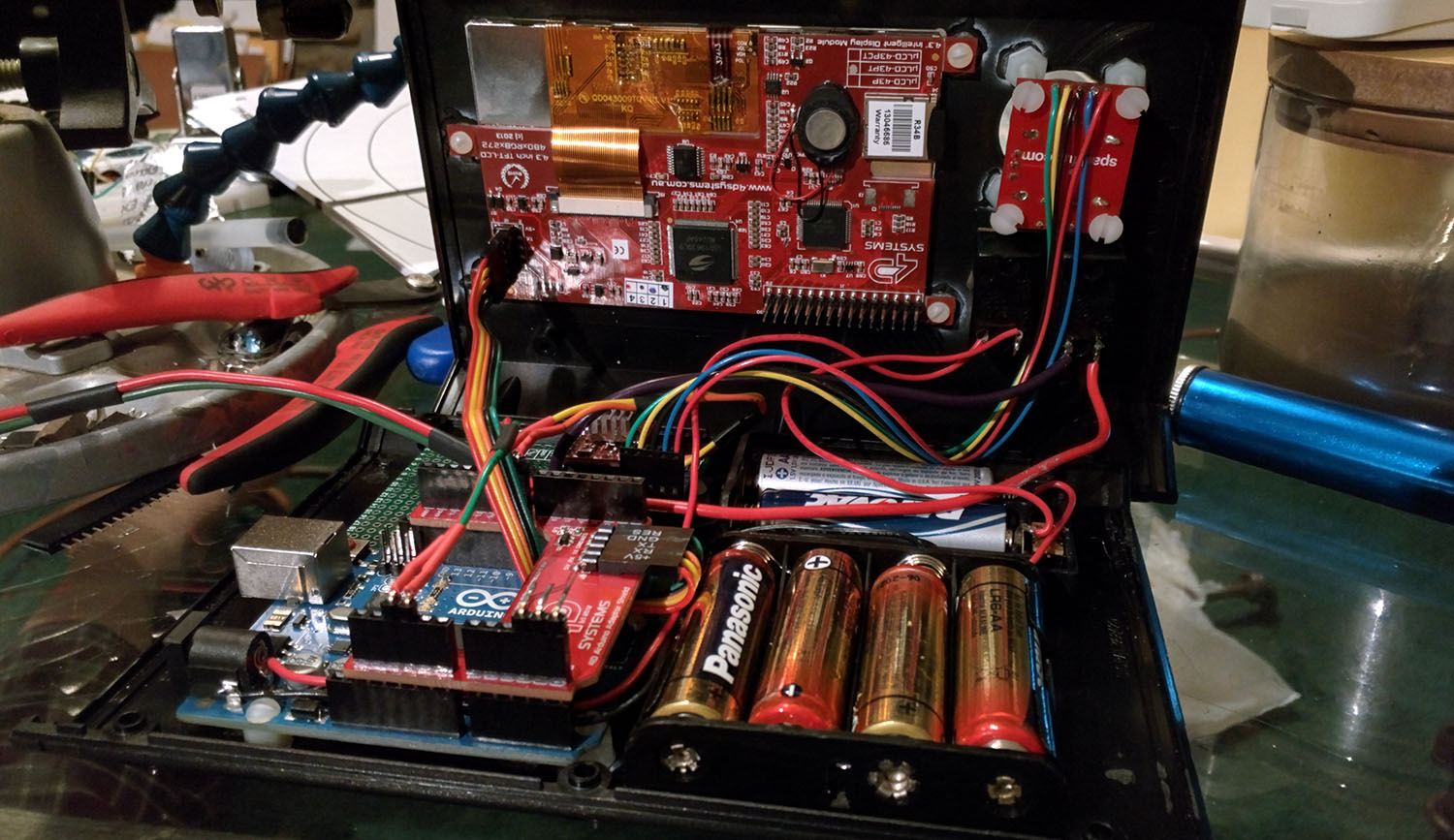
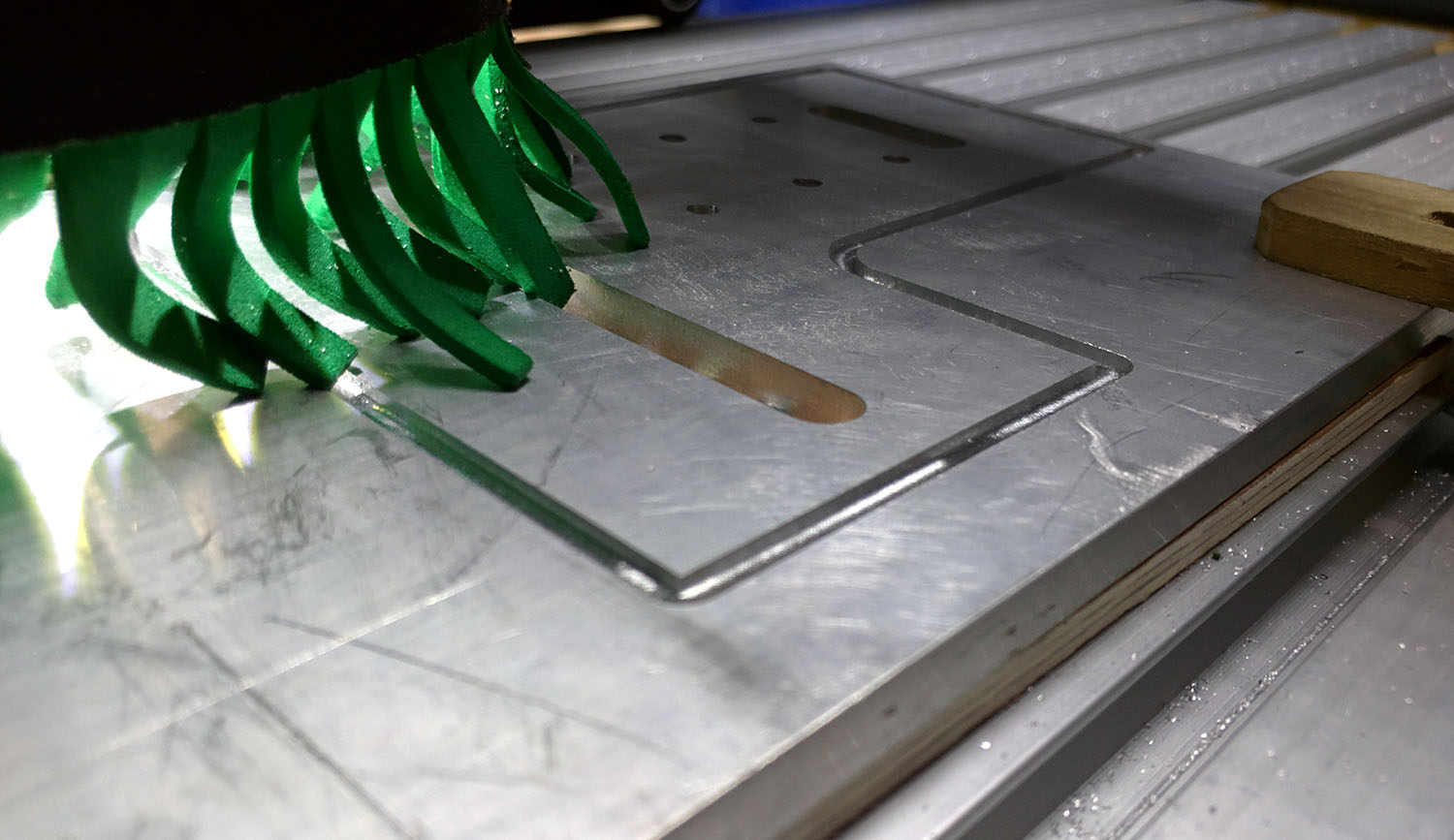
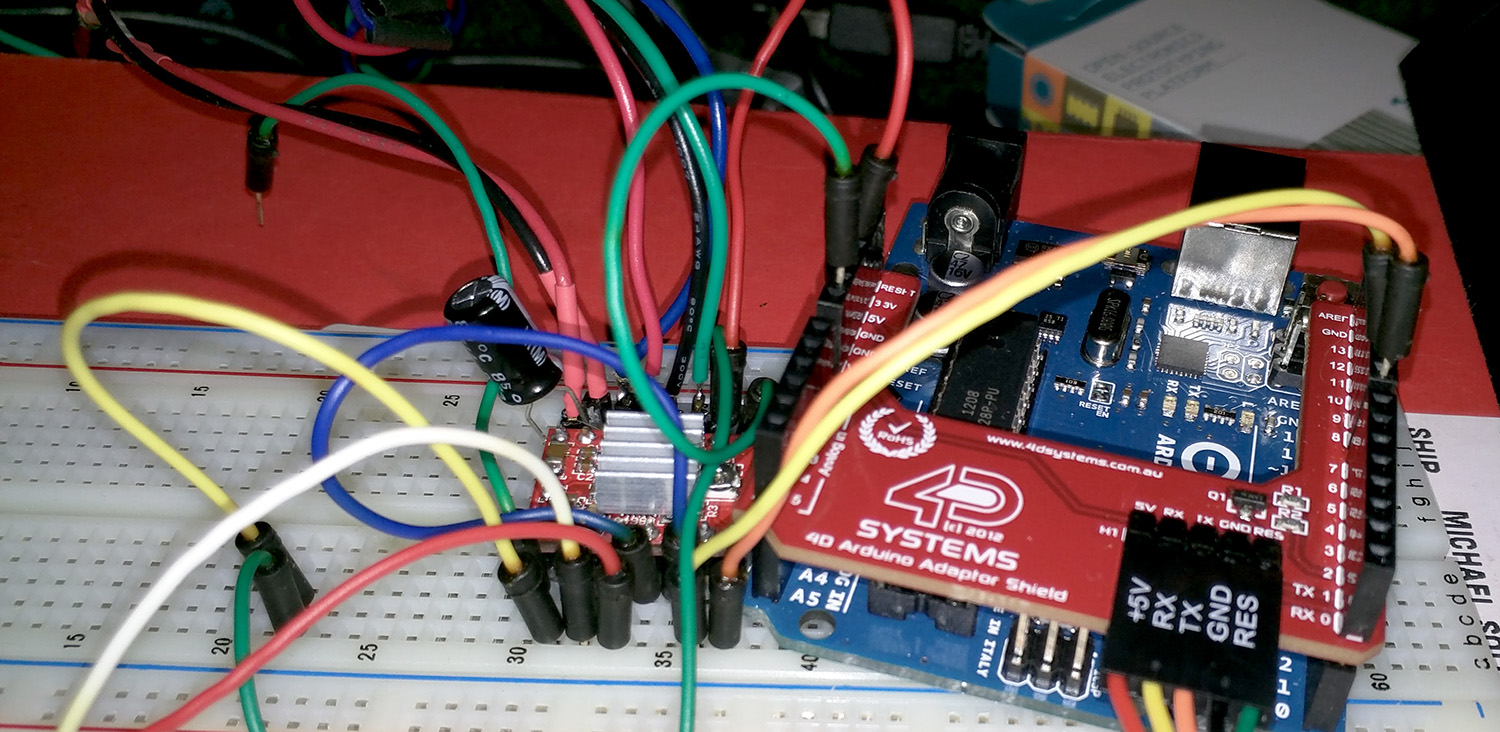
Meanwhile… Back at the batcave… The previous video was being controlled from my laptop. I needed a way to control this thing remotely. I wanted both immediate physical control (joystick) and programmable control for repeat performance. I needed something which could provide visual feedback as well as let me know the status of the system. I decided to use a 4D Systems touch screen instead of a bunch of dedicated physical buttons and switches. Sure… why not throw in a whole throng of unnecessary hardship in my path when I could have just made life far easier with physical real world things… but no, I had to go way too far off the deep end and go all touch screen.
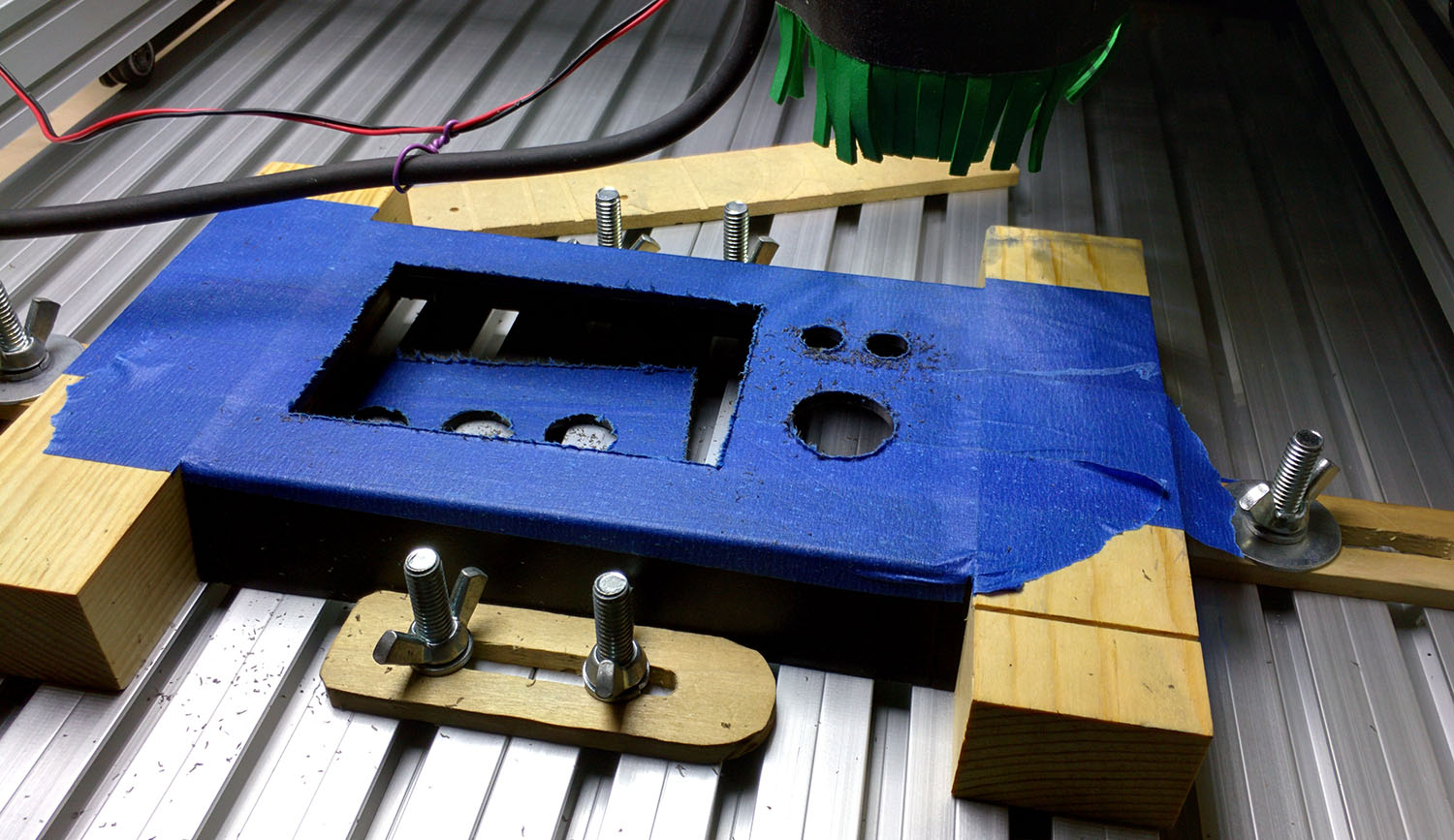
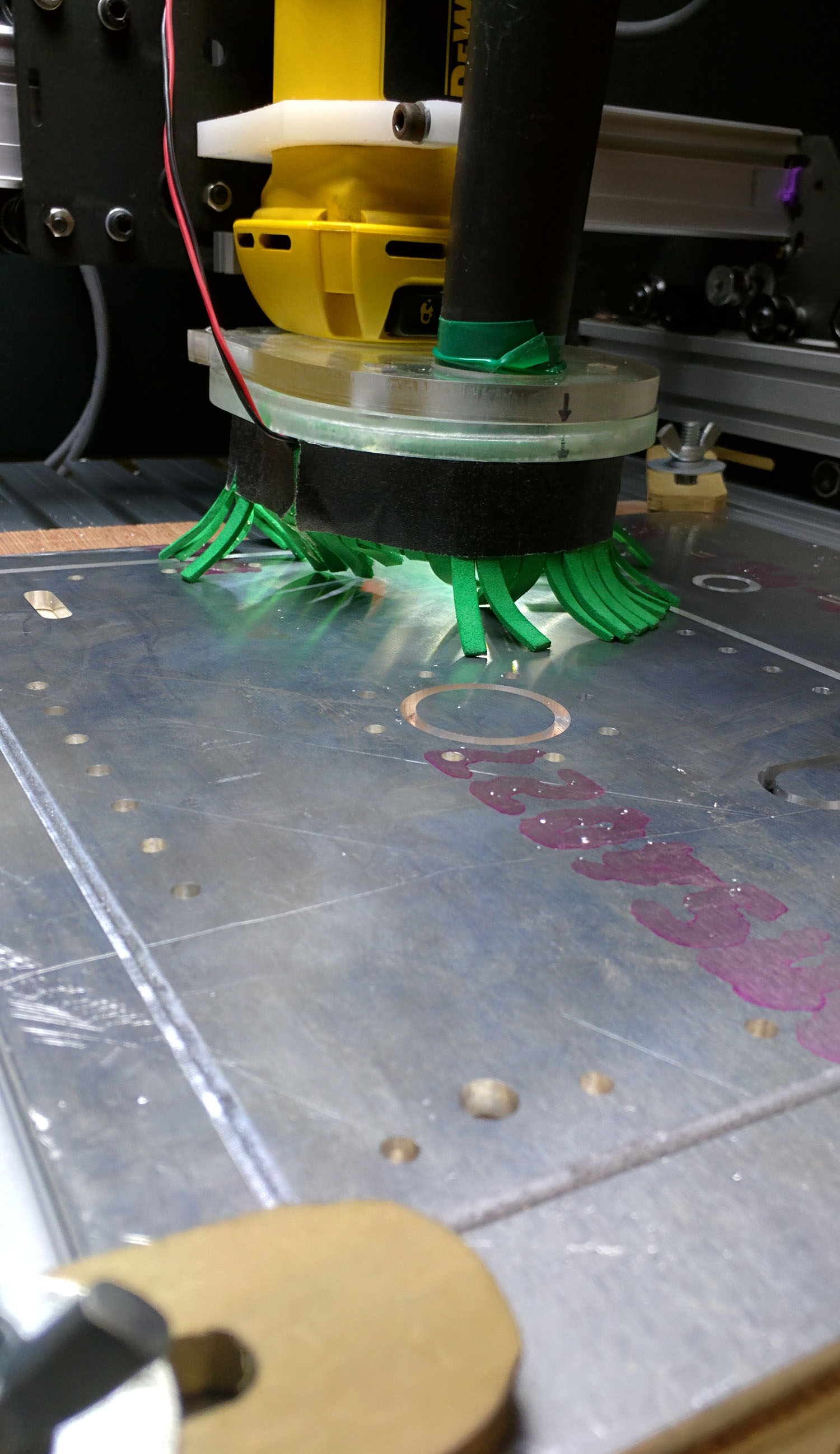
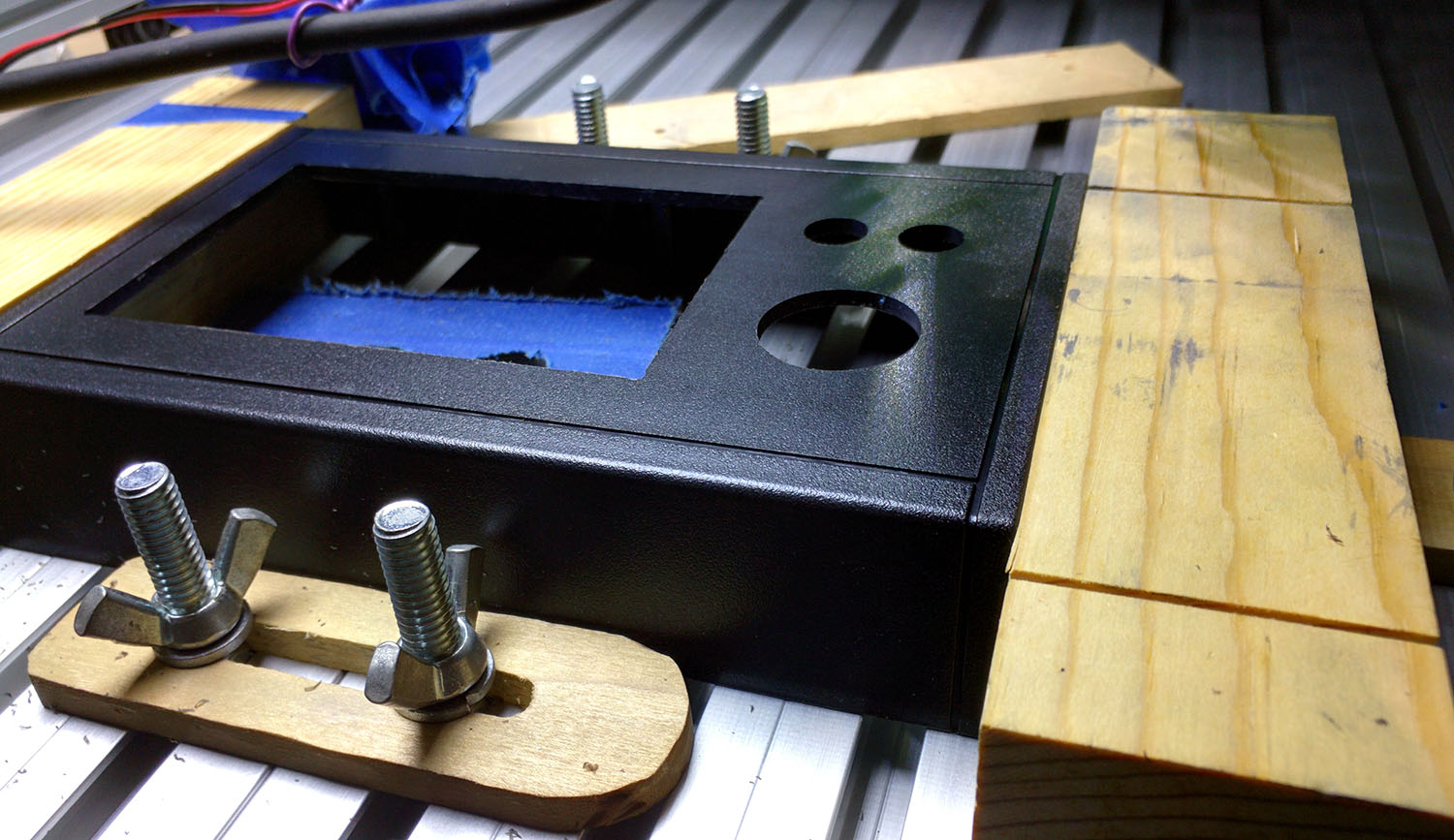
Well here’s the thing… I had purchased this one of their displays about a year ago and never used it for the project I intended it for. I needed to use it because it was stupidly expensive and I didn’t want it going to waste and it seemed to be the type of project which lent itself to perfectly. I used a plastic project box to contain it all. I designed the interface in Draftsight, and let the Shapeoko have at it. I used blue painters tape to help prevent rip-outs and to keep the surface clean. I then used some of my 80’s Tetris skillz to get all the shapes to fit into the box as tightly as possible as there was not very much room. There are a couple of switches. One is for the basic Arduino power and screen, then the second is for the higher voltage for the motors which would be supplied from the LiPo batteries used for RC aircraft. The second switch would also act as an emergency stop in case I needed it. It is an automated device, and I didn’t want to let a robot run without a way of stopping it dead in it’s tracks. Eventually I got it all packaged in the box. The problem I encountered was that updating the code now also required taking part of the box apart. While this doesn’t seem like a big deal, I am really scared that the universe will discover that I had too much mater in one location and result in an explosion of some sort. Taking the box apart just exposes a lot of fragile things to danger, and I once you have come this far, having an accident could result in a lot of time / money trying to fix what usually comes down to a moment of stupidity (I live in a house with a giant golden retriever which has a tail with a striking force of several thousand pounds, capable of destroying most things in it’s path, let alone also the potential spilling drinks and or other liquids one wouldn’t want on their electronics).
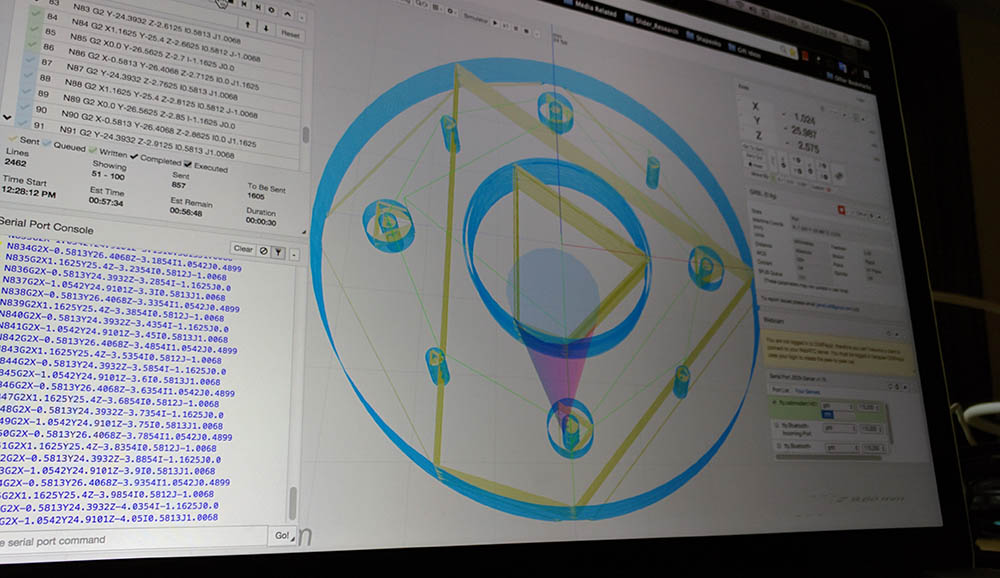
One of the hardest parts of all of this was the programming. I am not a programmer, but I do what I need to do, and learn what I need to learn to make things work. Most of the time, and especially in times like this, I was way out of my comfort zone. There were two sides to the programming. One is the Arduino code itself which is hard enough, but then there’s the LCD code. There’s also the design of the LCD. The LCD is touched which in return sends commands serially to the Arduino. The Arduino then goes to town on whatever I told it to do and sends feedback back to the LCD. The LCD then interprets what was sent, and displays this on the screen. This back and forth pattern must be thought through and as I found out the hard way, you really need to have all your wants and desires planned out. For some reason everything is numbered on the display and if you delete something, or add something above an item which was already there, you can not renumber the items, it just becomes the next in line. This becomes very confusing when you are trying to program some very odd stuff to start with. Many times, you are unsure if it is a coding mistake, or a numbering mistake (which yes, is coding, but not the structural stuff). Everything for the display is loaded onto a microSD card which is inserted into the display. If you are developing for it and trying to get code working, you render the code and graphics onto the card, eject the card from the computer, insert it onto the display, connect it to the Arduino, turn on the Arduino, test and realize that things are not how you envisioned them to be, shut everything down, disconnect the monitor, eject the card, put it back in the computer, choose the windows side of the Mac, go back into the 4D software, tweak, and repeat. But the up side, is that you have a touch screen interface in a fairly short amount of time. Once the touch system and Arduino was sorted out, it was time to get the cameras working with the controller.
Having worked on my Blackbox Camera Controller (yes yes yes… blogpost forthcoming) several years ago, I was somewhat familiar with how to trigger a camera. Well… I was familiar with how to trigger a Cannon, but not so much with Panasonic cameras. Cannons use a 5 pin cable which works by closing a circuit to trigger the focus, and closing another circuit to trigger the shutter. The I found that the GH4 was not at all the same. It uses different ranges of resistance, or better said, different ranges of voltage to trigger various functions. The resistance was the part I needed to sort out. While I found a couple articles on line, it was a little interesting getting it to work.
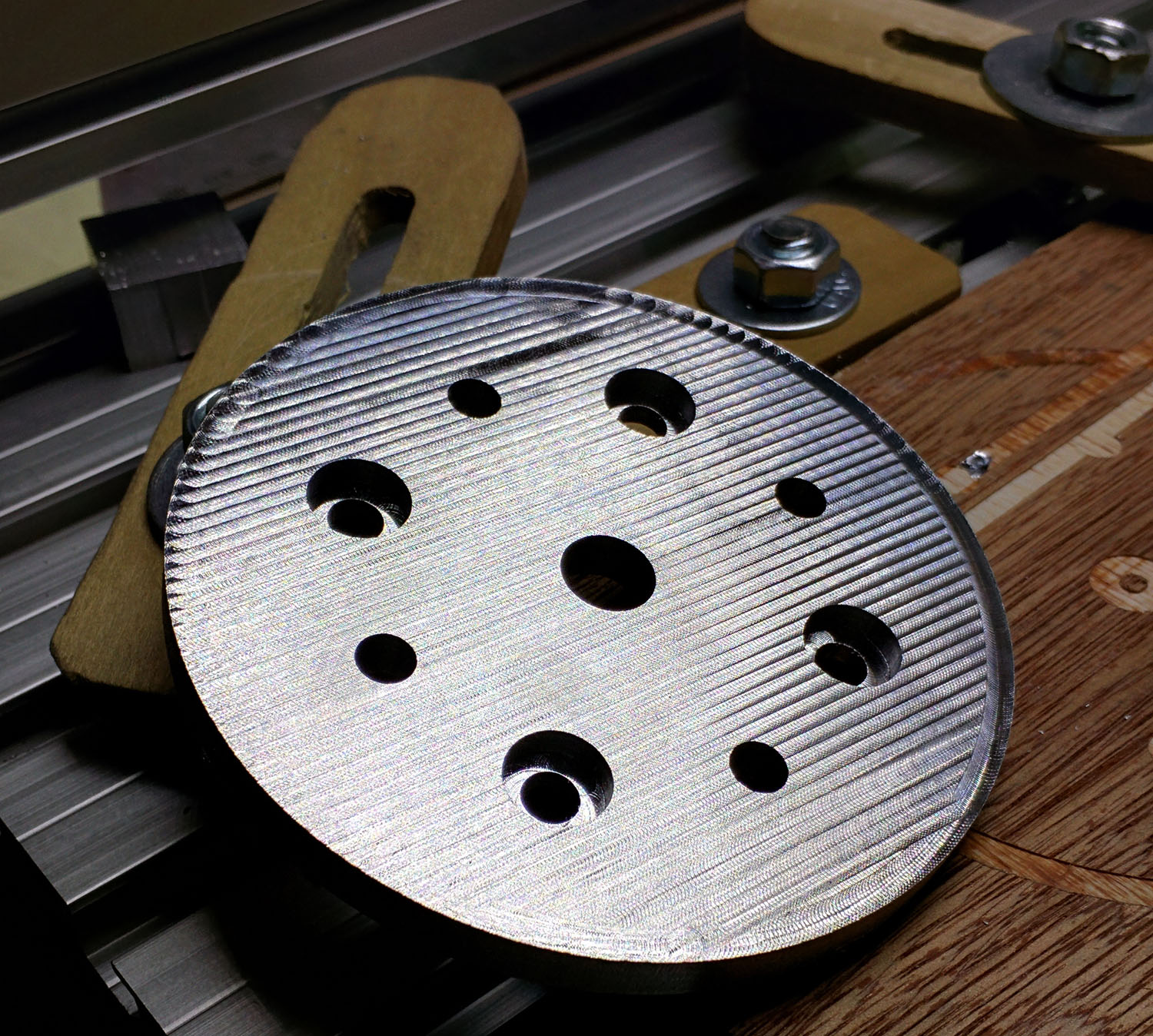
So where does all of this lead us? It leads us to machines taking over the world. Bow to your new masters. When you start to see a project like this come together… there are just no words. You turn the thing on, put in the settings telling it how you want it to behave, and then you press go. After that, it’s just doing what it was told. For the timelapse, I usually have it move, then settle for a second or so (we want a nice sharp image). Then it triggers the camera to shoot an image. Currently it is all set in camera, but changing the length of the exposure would not be difficult, it’s just setting a longer delay between the pin high and pin low. At this point, I could just put the camera into a bulb mode and let the Arduino drive the length. This will be great for things like sunrises where the light levels will change quite a lot. Back to the sequence… Once the camera has fired, it starts the cycle over again. It can be set up for how much distance it moves between images as well. Currently I have the slider working and the pan and tilt are on hold. I built a center disk specifically to take a camera head. I needed to get this up and running for a project we were working on at work. So, I made a major push to get all of this done in my evenings after work. Most of this came together within about a month and I was working on the programming up until about 15 minutes before the first shoot we needed this for. It was a really tight finish. But the video turned out beautiful and our people loved it. After our convention, I was ready for some down time, so what does a technonerd do? Yeah, takes all his camera stuff and heads out on vacation. Here’s a short video I shot from the back porch, again while I was grilling (seeing a trend here?).
Getting the precious home was one thing. Getting it to work was the next. I wanted to see these things light up. While the internet is one of my favorite things, trying find the right words to search when stepping into a completely new subject can be tricky. This one fortunately came together rather quickly. These signals are called (wait for it…) “Colored Light Signals“. More, mine are “R2” 3 Light Colored Light Signals. Some places throw a ‘vertical’ in the title somewhere too. The details start to fall off quickly and get somewhat vague. While there are many people who collect train items, or “Railroadiana” as I have just learned, not many people write about it, or more to the point, restoring it. Don’t get me wrong, I found a few sites, but the real juicy details run a little thin. I decided that it was time to pull out the multimeter and figure out the wiring myself.
I got the first signal flipped around so I could get at it’s innards. The CSX guy had taken the lock off of this unit when I was talking to him, so there were no issues getting into it. When I opened it up, I found years, and years of bugs, dirt, and all sorts of other miscellaneous debris that had accumulated. They have a seal that appears to be a heavy cotton weave that was dipped in perhaps oil, or tar. But these seals have dried out long ago and started to fall apart, giving all sorts of creatures free access to come and go as they please. Lady bugs seem to be especially popular. I spent a few minuted with a brush and a vacuum getting it cleaned out.
I am impressed with how tough they built these things to be. All the wiring is thick and heavy. All connections are double bolted to assure nothing would come apart. In the information I found, it looks like these run on 12 volts, but it’s a little odd, the bulbs are spec’d at 10v. There were only 4 wires and 3 lights, so this was going to be somewhat easy. For the un-electronically minded, in order to light a bulb, you need to make a circuit that spans from the voltage source, to what we call ground. If there is a break anywhere along the way, the electricity can not flow from point a to z. If you test a system like this, and all the bulbs are in good condition, it would seem as if all these wires were connected. And technically, they are. This is because a the light bulb filament is nothing more than a coiled wire with high resistance. The resistance causes this wire to heat up and glow. In order to sort out which wires go to which lights, and which one is ground, we need to break the circuit. The easy solution here is to remove the lightbulbs. Once the bulbs were out, I was able to identify the red, yellow, and green lights. The green is actually almost blue. I labeled, the wires with colored electrical tape for easy identification at a later point.
It was time to test the signal. I have a fairly intense 12 volt power supply I picked up from the Hamfest last year. I put the bulbs back into their sockets. Being that ground is always ground, I alligator clipped ground to the power supply. Then I was able to go through each bulb. These signals have been through a lot of abuse as of late. They were removed from God knows where and tossed on some sort of vehicle. There were clearly dumped where we found them. Given the scars, and bends in the metal, they have been bashed a few times. All 3 bulbs lit without issue. Impressive. While I was in and amongst the lenses, I figured that they probably had not been washed… ever. I removed the lens retainer rims and pulled out each of the 8.5 inch lenses. I gave them a good scrub in some hot soapy water as the gunk that they were covered in just would not come off. After a bit of work, they started to sparkle. There was a residual black substance on the lenses that looked like spray paint overspray. I went after this with some acetone which took it right off.
I then worked on the shrouds. The shrouds were seriously banged up. I unscrewed these from the main body. Sadly some of the screws heads were snapped off in the rough handling. I still need to sort out how to back those out. But the rest were removed and replaced. The old ones were getting old and quite rusty. I was able to sort out the screw type with the sweet little screw board they have at our local ACE. They are 10-32 in case you are looking for sizes (or placed here in case I forget). Once they were off, I used a flat headed hammer and started the somewhat lengthy process of banging these things back into shape. After a while, these things started to look quite proper. I screwed them back onto the signal and lit the whole thing up. Alive… IT’S ALIVE!!! Muahh ahh ahhhh.
Getting into the second signal was not as easy. Being that this was a ‘late offering’, it came intact and with a lock. It was clear that this lock meant business, and it was not going to be bypassed with a simple wire cutter. More, I did not want to break the thing as it was pretty cool. It was time to dust off my lock picks and see if I could get in. The lock was pretty rusty, so I drenched it with WD-40 and let it sit for a while. After some time, I gave it a go. It became clear somewhat quickly that this needed a lot of tension. There were wafers on both top and bottom which was a little challenging as I had to off set the tension so I could get at both sides. Once I figured that out, I got the keyway to turn in no time. The keyway might have turned, but the shackle did not budge. Not even a little. This was somewhat puzzling. If the keyway turned, that thing should have popped. I started reading up on these locks. If it were a newer lock this would have been a feature of the lock, it would have gone into a failure mode if opened incorrectly, but this was not the case. The 3 digit code is a manufacturer code which states when the lock was made.. This lock was made in November of 1990. I started to really look at the whole lock. One thing that struck me is how much paint was on it. It looks like the signs would get an occasional coating of paint. The coating is not handled with care, nor precision, rather it is just sort of slathered on and whatever gets hit, gets hit, and it just gets caked on. I started wondering if the lock had gotten paint inside of the shackle casing. Feeling a little silly, and knowing that there was no way that I would be able to hurt the signal, nor the lock, I re-picked the lock. Once I got it to turn, I placed my feet on both sides of the signal and gave the lock a pretty good yank. POP. It came right open. So paint was the culprit here.
Once inside of this one, again I found years of critter collection. This signal had something a little different inside. The bulb behind the red lens had been replaced with a 12 volt LED module. It is like everything else, heavy duty, and all metal. Quickly getting the wiring sorted out again, I proceeded to testing. Again all 3 lit up without issue. Awesome. Next up is to pound out the shrouds for this unit but I was out of time.
If you are interested in historical insider train reference materials, I found this great page of all sorts of great books and documents.

 I have never been much into beer. I had tried it a number of times but it never made sense to me. This all changed few years ago (2014) when we decided to travel to Ireland. I was not about to go to Ireland and not sit in a couple pubs and have a not few pints of Guinness. Sorry if that sounds a bit chiché, but I was going to have the full experience. So… I started training my tastebuds (at least that’s what I told my wife). I brought some Guinness home to get an idea what might be in store for us. To my surprise, it wasn’t bad.
I have never been much into beer. I had tried it a number of times but it never made sense to me. This all changed few years ago (2014) when we decided to travel to Ireland. I was not about to go to Ireland and not sit in a couple pubs and have a not few pints of Guinness. Sorry if that sounds a bit chiché, but I was going to have the full experience. So… I started training my tastebuds (at least that’s what I told my wife). I brought some Guinness home to get an idea what might be in store for us. To my surprise, it wasn’t bad. Since then, Guinness has still been a favorite. I found that it’s not that I didn’t like beer so much as I didn’t like the watered down crap at the grocery store. I am learning that I like darker, more complex flavors. I like to cook and have a propensity towards layers and depth of flavor, so perhaps the beer thing is understandable. I seem to have settled into Stouts, Porters, and some IPAs. About a half year ago I came across Northern Brewer. They sell kits to make craft beers at home. They had a great set of videos explaining in great detail how to brew their beers. I was sold. I asked for the White House Honey Porter kit for Christmas, and my wife was kind enough to get it for me. My son-in-law got me a book called How to Brew. (update: A Very good book. I recommend it. It’s written in layers. He provides a base layer of information, then starts over and lays in more and more details. It’s nice because you get the process and which point one can get as deep as one wants by continuing through the rest of the book. 04-02-17).
Since then, Guinness has still been a favorite. I found that it’s not that I didn’t like beer so much as I didn’t like the watered down crap at the grocery store. I am learning that I like darker, more complex flavors. I like to cook and have a propensity towards layers and depth of flavor, so perhaps the beer thing is understandable. I seem to have settled into Stouts, Porters, and some IPAs. About a half year ago I came across Northern Brewer. They sell kits to make craft beers at home. They had a great set of videos explaining in great detail how to brew their beers. I was sold. I asked for the White House Honey Porter kit for Christmas, and my wife was kind enough to get it for me. My son-in-law got me a book called How to Brew. (update: A Very good book. I recommend it. It’s written in layers. He provides a base layer of information, then starts over and lays in more and more details. It’s nice because you get the process and which point one can get as deep as one wants by continuing through the rest of the book. 04-02-17).  Similar to my Guinness experience, I wanted to get the full understanding of each character in play, so I took the time and smell and give some thought about what was going on. The specialty grains were nice. They smell sort of like a natural foods store sort of a sweet hay with hints of chocolate. My mother-in-law said it smelled like peanut butter (which I could smell once she said it). I put the grains in the muslin bag. This was then placed in the cool water. I started heating the water on full heading towards a boil. The warm water and grain smells a little bit like vegetable barley soup. It’s actually quite nice.
Similar to my Guinness experience, I wanted to get the full understanding of each character in play, so I took the time and smell and give some thought about what was going on. The specialty grains were nice. They smell sort of like a natural foods store sort of a sweet hay with hints of chocolate. My mother-in-law said it smelled like peanut butter (which I could smell once she said it). I put the grains in the muslin bag. This was then placed in the cool water. I started heating the water on full heading towards a boil. The warm water and grain smells a little bit like vegetable barley soup. It’s actually quite nice. The water was getting warm and I was a couple minutes away from needing to remove the grains. I started prepping my next step which was the first layer of hops, and the malt. The initial hops Chinook had a crazy strong scent. It was strong, like an ipa on steroids. The malt didn’t have much of a smell at all. After the 10 minutes was up I pulled the grain bag and strained it (putting the drippings back into the boil pot). I reduced the heat and added the hops and malt. This made the mixture very thick for a few minutes until I got it all mixed together. I brought the mixture back up to a boil watching to make sure it did not boil over (which was warned about in the instructions). It came close to boiling over, but reducing the heat settled everything out. The hops smell was very intense for a couple minutes, at which point it relaxed into a sort of chocolate milkshake(ish) smell. I’m thinking the milkshake vibe comes from the malt. After roughly 5 minutes I reduced the heat to keep it at a boil, but not be so intense as to lose too much water (I do want some beer at the end of all of this).
The water was getting warm and I was a couple minutes away from needing to remove the grains. I started prepping my next step which was the first layer of hops, and the malt. The initial hops Chinook had a crazy strong scent. It was strong, like an ipa on steroids. The malt didn’t have much of a smell at all. After the 10 minutes was up I pulled the grain bag and strained it (putting the drippings back into the boil pot). I reduced the heat and added the hops and malt. This made the mixture very thick for a few minutes until I got it all mixed together. I brought the mixture back up to a boil watching to make sure it did not boil over (which was warned about in the instructions). It came close to boiling over, but reducing the heat settled everything out. The hops smell was very intense for a couple minutes, at which point it relaxed into a sort of chocolate milkshake(ish) smell. I’m thinking the milkshake vibe comes from the malt. After roughly 5 minutes I reduced the heat to keep it at a boil, but not be so intense as to lose too much water (I do want some beer at the end of all of this).  I let it perk along for 40 minutes at which point the instructions had me remove the heat add the honey and a second hopping. This next batch of hops was a German Hallertau. It was very pleasant smell. Sort of like a more delicate hops decorated with a Christmas tree.
I let it perk along for 40 minutes at which point the instructions had me remove the heat add the honey and a second hopping. This next batch of hops was a German Hallertau. It was very pleasant smell. Sort of like a more delicate hops decorated with a Christmas tree. As I have been reading, one topic of which there has been a huge amount of emphasis, is sanitization, and it is the point where I nearly tripped up. The process of beer making is actually a war of micro organisms and their food supplies. You want certain things to grow but not others. I poured the honey into the boil pot, I then used some of the hot wart water to get the rest of the honey out. This would be fine in standard cooking, but the jar was not sanitized and some of the liquid touched the outside of the jar. I am sure it’s pretty clear at this point I am not an experienced brewer, and it’s possible this little of a slip may have been perfectly fine, but I didn’t want to take any chances and brought the wart back to a boil. I let it go for a couple of minutes, and then I put the pot into an ice water bath.
As I have been reading, one topic of which there has been a huge amount of emphasis, is sanitization, and it is the point where I nearly tripped up. The process of beer making is actually a war of micro organisms and their food supplies. You want certain things to grow but not others. I poured the honey into the boil pot, I then used some of the hot wart water to get the rest of the honey out. This would be fine in standard cooking, but the jar was not sanitized and some of the liquid touched the outside of the jar. I am sure it’s pretty clear at this point I am not an experienced brewer, and it’s possible this little of a slip may have been perfectly fine, but I didn’t want to take any chances and brought the wart back to a boil. I let it go for a couple of minutes, and then I put the pot into an ice water bath.